
羽ばたき飛行機の羽ばたき時の流体力計測
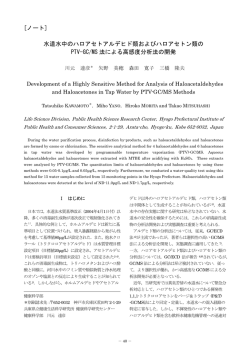
ឡ⥲◊࣭◊✲ሗ࿌ 愛総研・研究報告 ➨ 16 号 2014 ྕ 2014 年 ᖺ 第 49 ⩚ࡤࡓࡁ㣕⾜ᶵࡢ⩚ࡤࡓࡁࡢὶయຊィ Measurement of aerodynamic forces for flapping Micro air vehicle ᕝ୍ᩗ͊㸪㔝ᮧ㐩ஓ͊͊㸪㫽ᒃ♸ኴ͊͊ Kazutaka Kitagawa͊, Tatsuya Nomura͊͊, Yuuta Torii͊͊ Abstract Unmanned micro aerial vehicles(UMAV) have carried out unmanned missions the natural disaster and a forest fire on airborne survey, and direct sowing on farmland. Development of automatic and radio controlled pilot flight system of MAV have focused on an aerodynamic behavior of low Reynolds number effect for biofluid in unsteady regime. The motivation of present study is to design the beetle-like flapping micro air vehicle for disaster investigating and planetary exploring. To explain the outline of flapping mechanism, the results of the visualization of the flap motion and the experiment on little aerodynamic force measurement using the cantilever system. 1㸬⥴ゝ ࢫ࣌ࢡࢺẚࡣ⩼ᖜࡢ୧⩼㠃✚ࡢၟ㸪⩼㠃Ⲵ㔜ࡣ༢ ࢺࣥ࣎㸪⼖㸪ࣁࢳࢻࣜࡸ࢝ࣈࢺ࣒ࢩࢆᶍೌࡋࡓ⩚ࡤࡓࡁ ⩼㠃✚ᙜࡓࡾࡢⲴ㔜࡛࠶ࡿ㸬ヨసᶵࡢࢫ࣌ࢡࢺẚࡣ 㣕⾜ᶵࡢ◊✲㛤Ⓨࡣ࢜ࣛࣥࢲ㸪⡿ᅜ㸪᪥ᮏࢆࡣࡌࡵ┒ࢇ ࡰྠࡌ⩚ࡤࡓࡁ࿘Ἴᩘࡢ⼖ᑐࡋ࡚ࡁࡃ࡞ࡿ㸬㉁㔞ࡣᶵ ⾜ࢃࢀ࡚࠸ࡿ㸬 యయࡢ㉁㔞࡛࠶ࡾ㸪࢝ࢼࣈࣥ㏆࠸⩼㠃Ⲵ㔜㏆࡙ࡅࡿ ≉㸪⏥ࡣ⬗య㒊ࡢᐜ✚ࡀ᪻ẚࡋ࡚ࡁࡃ㸪ྛ ✀ᶵჾࡢᦚ㍕᭷࡞ࡿሙྜࡀ࠶ࡿ㸬ᮏ◊✲ᐊ࠸࡚㸪 ᖺࡽࢥ࢞ࢿ࣒ࢩ⛉⏥ࡢࢻ࢘࢞ࢿ࢝ࢼࣈࣥࡢ⩚ࡤ ࡓࡁ㣕⾜ࡘ࠸࡚㸪ὶࢀሙࡸὶయຊィ ࢆ⾜࠸㸪㣕⾜≉ᚩ ὀ┠ࡋ◊✲ࢆ⾜ࡗ࡚࠸ࡿ㸬 ᮏ◊✲࡛ࡣ⏥ᆺ⩚ࡤࡓࡁ㣕⾜ᶵࡢ〇సࡢ➨ Ṍࡋ࡚㸪 ࣇࣛࢵࣆࣥࢢ㐠ືࢆ⾜࠺⩚ࡤࡓࡁᶵᵓࢆタィ࣭〇సࡋࡓ㸬 ⩚ࡤࡓࡁ㣕⾜ᶵࡢタィ᮲௳㸪ㅖඖ㸪⩚ࡤࡓࡁᶵᵓࡢᴫせ ⩚ࡤࡓࡁ㐠ືࡢྍどὶయຊィ ࢆ⾜࠸㸪㣕⾜ᶵࡢᛶ⬟ ࢆㄪᰝࡋࡓ㸬 2㸬⩚ࡤࡓࡁ㣕⾜ᶵ ⏥ࡢ⩚ࡤࡓࡁࡣࣇࣛࢵࣆࣥࢢ㐠ື㸪࣮ࣜࢹࣥࢢ㐠ື㸪 ࡓࡵ㸪㍍㔞ࡀᚲせ࡛࠶ࡿ㸬⩚ࡤࡓࡁ࿘Ἴᩘࡣ㸪ᑡ࡞ࡃ ࡶ 20㹼30[Hz]ࡍࡿᚲせࡀ࠶ࡿ㸬ࣞࣀࣝࢬᩘࡣ௦⾲㏿ ᗘࢆ㢼Ὕฟཱྀࡢὶ㏿㸪௦⾲㛗ࡉࢆ᭱⩼ᘻ㸪ື⢓ᗘࢆ✵Ẽ 20[Υ]ࡢࡢ್ࡋࡓ㸬↓ḟඖ࿘Ἴᩘࡣ௦⾲㏿ᗘࢆ㢼Ὕฟ ཱྀࡢὶ㏿㸪௦⾲㛗ࡉࢆ᭱⩼ᘻ㸪࿘Ἴᩘࢆ⩚ࡤࡓࡁ࿘Ἴᩘ ࡋࡓ್࡛࠶ࡿ㸬 ⾲1 Dimensional of the flapping air vehicle Wing span[mm] 160.6 Chord length[mm] 45.0 Wing thickness[μm] 8.0 2 Wing area[mm ] 5242 Aspect ratio[-] 4.9 Mass[g] 4.86 ࣇ࢙ࢨࣜࣥࢢ㐠ືࡢ 3 ✀㢮ࢆྲྀࡾධࢀ㸪⩟ࡢᙎᛶࢆ⏝ࡋ Wing loading[N/m2] 9.09 ຠ⋡ࡼࡃ㣕⩧ࡋ࡚࠸ࡿ㸬タィࡍࡿ⩚ࡤࡓࡁ㣕⾜ᶵࡣ㸪࢝ࢼ Beating frequency[Hz] 9.3 ࣈࣥࢆᶍೌᑐ㇟ࡋ㸪 ձ㉁㔞 1[g]㸪 ղ⩚ࡤࡓࡁ࿘Ἴᩘ 90[Hz]㸪 Reynolds number[-] 4345 ճ⩚ࡤࡓࡁ㐠ື㸦ࣇࣛࢵࣆࣥࢢ㸪࣮ࣜࢹࣥࢢ㸪ࣇ࢙ࢨࣜ Reduced frequency[-] 0.9 ࣥࢢ㸧࡛࠶ࡿ㸬⾲.1 ࡣヨసᶵࡢタィᵝࢆ♧ࡍ㸬⩼ᖜࡣ୧ ࢝ࢼࣈࣥࡣ⩼㠃✚ 269[mm ]㸪㉁㔞 0.9[g]㸪⩼㠃Ⲵ㔜 ⩼ࡢ⩼ᖜ㸪⩼ᘻࡣ᭱⩼ᘻ㸪⩼㠃✚ࡣ୧⩼ࡢ⩼㠃✚࡛࠶ࡿ㸬 3.3[N/m2]㸪ヨసᶵࡢタィⅬࡣ⩼㠃✚ 5242[mm2]㸪㉁㔞 7[g]㸪 2 ͊ ឡ▱ᕤᴗᏛ ᕤᏛ㒊 ᶵᲔᏛ⛉㸦㇏⏣ᕷ㸧 ⩼㠃Ⲵ㔜 13.1[N/m2]㸪ヨసᶵࡣ⩼㠃✚ 5242[mm2]㸪㉁㔞 ͊͊ ឡ▱ᕤᴗᏛᏛ㝔 ᕤᏛ◊✲⛉㸦㇏⏣ᕷ㸧 4.8[g]㸪⩼㠃Ⲵ㔜 9.0[N/m2]࡛㸪ࣁࢳࢻࣜ㏆࠸ᛶ⬟࡛࠶ࡿ㸬 ឡ▱ᕤᴗᏛ⥲ྜᢏ⾡◊✲ᡤ◊✲ሗ࿌㸪➨ 16 ྕ㸪2014 ᖺ 愛知工業大学総合技術研究所研究報告,第 16 号,2014 年 50 ᅗ 1a ࡣ⩚ࡤࡓࡁ㣕⾜ᶵ㸪b ࡣ⩚ࡤࡓࡁ㣕⾜ᶵࡢ 3 ḟඖ CAD ᅗ㠃㸪c ࡣᅄ⠇࡚ࡇࢡࣛࣥࢡᶵᵓࡢᴫせ㸪d ࡣ⩚ࡤ 㸬ᐇ㦂⨨ཬࡧᐇ㦂᪉ἲ ࡓࡁ⩼ࢆ♧ࡍ㸬⩚ࡤࡓࡁ㣕⾜ᶵࡣ㸪⬗యࡀI1.2[mm]ࡢ࢝ ᅗ 2a b ࡣὶయຊィ ᐇ㦂ࢫࢺࣟ࣎ࢫࢥ࣮ࣉ⩚ࡤࡓࡁ ࣮࣎ࣥࣟࢵࢻ㸪㛗 171[mm]㸪ᖜ 160.6[mm]࡛࠶ࡿ㸬 㐠ືࡢྍどᐇ㦂ࡢᴫ␎ࢆ♧ࡍ㸬ᅗ 2a ࡢὶయຊィ ࡣ྿ࡁ Indoor Airplane World ♫〇㉸ᑠᆺ㉥እ⥺ࣔࢪ࣮ࣗࣝࢆᐇ ฟࡋᘧ࢚ࢵࣇ࢙ࣝᆺᑠᆺ㢼Ὕฟཱྀ⩚ࡤࡓࡁ㣕⾜ᶵࢆタ⨨ ࡋ㸪10㹼30[m]ࡢ⠊ᅖ࡛᧯⦪࣭ไᚚࡀྍ⬟࡛࠶ࡿ㸬⩼௨ ࡋ⾜ࡗࡓ㸬ᅇࡢィ ࡛ࡣ㸪⩚ࡤࡓࡁ㐠ືࡢࢫࢺ࣮ࣟࢡ እࡢᶵయࡢ㉁㔞ࡣ 4.417[g]࡛࠶ࡾ㸪⩚ࡤࡓࡁ࿘Ἴᩘࡣ 7㹼 㠃ࡢゅᗘࢆ㢼Ὕὶࢀᆶ┤ 90[deg]タᐃࡋࡓ㸬ࡇࢀࡣ㸪⩼ 10[Hz]࡛࠶ࡿ㸬 㠃స⏝ࡍࡿὶయຊࡀ୍␒ຠ⋡ࡼࡃⓎ⏕ࡍࡿ≧ែࢆᐃࡋ ࡓ㸬⩚ࡤࡓࡁ㐠ື⏕ࡌࡿὶయຊィ ࡣ㸪ࡦࡎࡳࢤ࣮ࢪ ࢆᨭⅬ㏆ྲྀࡾࡅ㸪࢝ࣥࢳࣞࣂ࣮స⏝Ⅼ(➃㒊)⏥ᆺ ⩚ࡤࡓࡁ㣕⾜ᶵࢆᅛᐃࡋࡓ㸬࢝ࣥࢳࣞࣂ࣮ࡣస⏝Ⅼࡽ ࡢ㛗ࡉ 11.6[mm]㸪O.D. 3[mm]㸪I.D. 1.5[mm]ࡢ࣮࢝࣎ࣥࣃ ࣉ㸪ࡦࡎࡳࢤ࣮ࢪࡣओඹ㟁ᴗ〇༙ᑟయࡦࡎࡳࢤ࣮ࢪ KFG-5-120-C1-11 (ᢠ್㸸120[Ȑ]㸪ࢤ࣮ࢪ⋡㸸2.1)ࢆ⏝࠸ࡓ㸬 a flapping air vehicle b CAD design ࡦࡎࡳࢤ࣮ࢪࡢᅇ㊰ࡣ㸪 ᐃឤᗘྥୖࡢⅭ 2 ࢡࢸ ࣈࢤ࣮ࢪἲࢆ⏝࠸࡚࠾ࡾ㸪2 ᯛࡢࡦࡎࡳࢤ࣮ࢪࢆ⏝ࡋࡓ㸬 ᅛᐃࡋࡓ⏥ᆺ⩚ࡤࡓࡁ㣕⾜ᶵࡢᆶ┤᪉ྥࡢὶయຊ(Fv) Ỉᖹ᪉ྥࡢὶయຊ(Fh)ࢆྠィ ࡍࡿⅭ㸪2 ᯛ 1 ⤌ࡢࡦࡎ ࡳࢤ࣮ࢪࢆ 2 ⟠ᡤ㈞ࡾࡅࡓ㸬 c Four-bar lever crank d Flapping wing mechanism ᅗ 1 Description of the beetle-like micro air vehicle(MAV) ᅗ 1bձշ㒊ࡣI[mm]࣮࢝࣎ࣥࣟࢵࢻ㸪ղ㒊ࡣࣔࢪࣗ ࣮ࣝ 0.3㸪ࣉࣛࢫࢳࢵࢡ〇ࢠ㸪࣮ࣔࢱࡽᅄ⠇࡚ࡇࢡࣛ a Measurements of aerodynamic force ࣥࢡᶵᵓ㒊ࢠࡲ࡛ࡢࢠẚࡣ 26.7 ࡛࠶ࡿ㸬ճ㒊ࡣ 3D ࣉࣜࣥࢱ࣮ࡼࡾ㐀ᙧࡋࡓ⩼ࢡࣛࣥࢡࡢ㐃⤖㒊ရ㸪մ 㒊ࡣI4[mm]ࢥࣞࢫ࣮ࣔࢱ㸪ࢥࣝᢠ್ࡣ 7[ȍ]㸪࣮ࣔ ࢱ᭱ฟຊࡣ 0.28[W]࡛࠶ࡿ㸬յ㒊ࡣ⩼࡛࠶ࡾ㸪⬗యࡽ ศ㞳ࡋ࡚࠸ࡿ(ᅗ 1d ཧ↷)㸬ն㒊ࡣཷಙኚㄪ࿘Ἴᩘ 38[kHz]ࡢ㉥እ⥺ཷಙᶵ㸪㏦ಙ⠊ᅖࡣ 10㹼30[m]㸪ࢧࢬ 7.59[mm]࡛࠶ࡿ㸬շ㒊ࡣ㉁㔞 1.1[g]㸪ᐃ᱁㟁ᅽ 3.7[V]㸪 ᐜ㔞 30[mAh] Li-Po ࣂࢵࢸ࣮࡛ࣜ࠶ࡿ㸬ո㒊ࡣὶయຊィ ⏝࢝ࣥࢳࣞࣂ࣮ඛ➃㒊ࡢᅛᐃ㒊ศ࡛࠶ࡿ㸬ᅄ⠇࡚ࡇࢡࣛࣥ ࢡᶵᵓࡼࡾ࣮ࣔࢱࡢᅇ㌿㐠ືࢆࣇࣛࢵࣆࣥࢢ㐠ືኚ ࡍࡿᶵᵓ࡞ࡗ࡚࠸ࡿ㸬ᅗ 1c ࡽࣇࣛࢵࣆࣥࢢ㐠ືࡢ b Visualization of flapping motion ᅗ 2 Experimental setup ࢫࢺ࣮ࣟࢡゅࡣࢥ࢞ࢿ࣒ࢩ⛉⏥ࡢ࢝ࢼࣈࣥࢆᶍೌࡋ㸪 ᅗ 2b ࡢ⩚ࡤࡓࡁ㐠ືࡢྍどࡣ㸪↓㢼ࡢᐃᖖⓗ࡞⩚ ⩼ ࢆ Ỉ ᖹ ⨨ ࡽ ୖ Ṛ Ⅼ (Top Dead Center : ௨ ୗ ࡤࡓࡁ㐠ື㸪ࢹࢪࢱࣝࢫࢺࣟ࣎ࢫࢥ࣮ࣉ’㸦Ⳣཎ◊✲ᡤ T.D.C) 51[deg] 㸪 ୗ Ṛ Ⅼ (Bottom Dead Center : ௨ ୗ S-126X㸧ࢆタ⨨ࡋ㸪ࢹࢪࢱ࣓ࣝ࢝ࣛ(ࢽࢥࣥ D800)ࡼࡾ B.D.C) 29 [deg]ࡋࡓ㸬ᅗ 2d ࡢ⩼ࡣ㸪⩼⭷ࡢཌࡉ 8[μm] ᙳࢆ⾜ࡗࡓ㸬 ࡢ࣏࢚ࣜࢳࣞࣥࣇ࣒ࣝ㸪⩼ᖜ 80.3[mm]㸪᭱⩼ᘻ㛗 45[mm]࡛࠶ࡿ㸬⩼㦵ཬࡧ⩟⬦ࡣI0.5[mm]ࡢ࣮࢝࣎ࣥࣟ 㸬ᐇ㦂⨨ཬࡧᐇ㦂᪉ἲ ࢵࢻࢆ⏝ࡋ㸪⩼➃ࡽ⩼᰿᪉ྥ㛗ࡉ 46[mm]ࡢ࣮࢝࣎ ࣥࣟࢵࢻࡢ⩟⬦ࢆ㈞ࡾࡅࡓ㸬 ᅗ 3a 3b ࡣ⏥ᆺ⩚ࡤࡓࡁ㣕⾜ᶵࡢ T.D.C ࡽ୍࿘ᮇ ⩚ࡤࡓࡁ㣕⾜ᶵࡢ⩚ࡤࡓࡁࡢὶయຊィ 羽ばたき飛行機の羽ばたき時の流体力計測 ศࡢࣇࣛࢵࣆࣥࢢ࣮ࣔࢩࣙࣥࢆ♧ࡍ㸬ᅗ 3a ࡣ T.D.C ࡽ 51 ࡚㸪ࣇ࢙ࢨࣜࣥࢢ㐠ືࡼࡗ࡚㸪ྤฟ ࢆⓎ⏕ࡋ࡚࠸ࡿ B.D.C ࡲ࡛㸪ᅗ 3b ࡣ B.D.C ࡽ T.D.C ࡲ࡛ࡢࢫࢺࣟ࣎ᙳ ࡀ㸪Fv Fh ࡣṤྠࡌࡁࡉࡢὶయຊࢆⓎ⏕ࡋ࡚࠸ࡿ㸬 ࡢ⤖ᯝࢆ♧ࡋ㸪ྛ┿ࡢ㛫㛫㝸ࡣǼt = 1.00msec ࡛࠶ࡿ㸬 T*=0.18 ㏆ࡲ࡛㸪Fv ࡣቑຍ㸪Fh ࡣᢠࢆ⏕ࡌῶᑡࡍࡿ㸬 ᅗ 3a ࡽ⩼ࡣ㸪T.D.C ࡽࡢࡾୗࡆ㐠ື࡛㸪ὶయຊࡢᙳ 㡪ཬࡧ⩟⬦ࡢ⮬㔜ࡼࡾࣇ࢙ࢨࣜࣥࢢ㐠ືࢆ⾜ࡗ࡚࠸ࡿ㸬 B.D.C ྥࡗ࡚㸪㏄ゅࡢᑠࡉ࠸ࡲࡲ㸪㝆ࡾୗࡆືసࢆ⾜࠸㸪 ୗṚⅬ㏆ࡃ࡛㏄ゅ≧ែࡢኚ᭦ࡍࡿ㸬ᅗ 3b ࡽ⩼ࡣ ㏄ゅ≧ែࡽ㸪ࡾୖࡆ㐠ືࣇ࢙ࢨࣜࣥࢢ㐠ືࢆ⾜ࡗ࡚ ࠸ࡿ㸬T.D.C ྥ࠺ࡘࢀ࡚㸪㏄ゅ≧ែࢆᑠࡉ࠸㏄ゅ ኚ᭦ࡋ࡚࠸ࡿ㸬T.D.C ㏆࡛ࡣ㸪㏄ゅኚࡋ㸪⩟⬦ࡢᙳ 㡪ࡀฟጞࡵࡿ㸬௨ୖࡢࡼ࠺࡞୍㐃ࡢືసࢆ⧞ࡾ㏉ࡍࡇ࡛㸪 ⩚ࡤࡓࡁ㣕⾜ࢆ⾜ࡗ࡚࠸ࡿ㸬 ᅗ 4 Time histories of vertical and horizontal force for the beetle-like MAV (Stroke face angle = 90 [deg]) T*=0.18 ࡛๓⦕㞳 ࡢⓎ⏕ࡼࡗ࡚㸪Fv ࡣῶᑡ㐣⛬㸪 Fh ࡣቑຍ㐣⛬⛣ࡗ࡚࠸ࡿ㸬T*=0.33 ࠾࠸࡚㸪๓⦕㞳 ࡢⓎ⏕ࡢ☜ㄆࡀ࡛ࡁࡿ㸬ࡋࡋ㸪Fv ࡣ᭱ᑡ࡞ࡗ࡚㸪ቑ ຍ㐣⛬ධࡾ㸪Fh ࡣῶᑡ㐣⛬ධࡿ㸬T*=0.50 ࡢ B.D.C ࡛ ⩚ࡤࡓࡁ㐠ືࡣࡾୖࡆ㐠ື࡞ࡿ㸬ࡇࡢ Fv ࡣῶᑡࡋጞ ࡵ㸪Fh ࡣቑຍࡋጞࡵࡿ㸬T*=0.65 ࡢࡾୖࡆ㐠ື࡛ࣇ࢙ࢨ ࣜࣥࢢ㐠ືࢆ⾜ࡗࡓᚋ㸪Fv ࡣቑຍࡋ㸪Fh ࡣῶᑡࡋጞࡵࡿ㸬 a Down stroke motion T*=0.81 ࡢࡾୖࡆ㐠ື࡛⩼ୗ㠃๓⦕㞳 ࡀ☜ㄆ࡛ࡁ㸪 Fv ࡣῶᑡࡋጞࡵ㸪Fh ࡣቑຍࡋጞࡵࡿ㸬T*=1.00 ࡛ T.D.C ᡠࡾ㸪ྠࡌὶయຊᙧᡂࡀ⧞ࡾ㏉ࡉࢀࡿ㸬 ⩚ࡤࡓࡁ㣕⾜ᶵࡢືຊࡼࡗ࡚㸪ὶయຊィ ୰࢝ࣥࢳ ࣞࣂ࣮ࡀືࡋࡓ㸬ᶵయᚋ᪉ࣂࢵࢸ࣮ࣜࢆ⛣ືࡋ㸪✵ຊ ୰ᚰࡣ࢝ࣥࢳࣞࣂ࣮స⏝Ⅼ㏆⛣ືࡉࡏࡓ㸬ࡑࡢ⤖ᯝ㸪 ᅄ⠇࡚ࡇࢡࣛࣥࢡᶵᵓࡽࡢືࡀఏࢃࡾ㸪ࣂࢵࢸ࣮ࣜ ㏆ࡽࡶ⮬㔜ࡼࡾືࡋ࡚ࡋࡲࡗࡓ㸬ࡲࡓ⩼⭷ࢆࡅ࡚ ࠸࡞࠸≧ែ࡛⩚ࡤࡓࡁ㐠ືࢆ⾜ࡗࡓࡇࢁ㸪ᅄ⠇࡚ࡇࢡࣛ ࣥࢡᶵᵓࣂࢵࢸ࣮ࣜࡽࡢືࡀࡦࡎࡳࢭࣥࢧఏࢃࡗ ࡚࠸ࡿࡇࢆ☜ㄆࡋࡓ㸬ᅇࡢὶయຊィ ⤖ᯝࡣ㸪⩚ࡤ b Up stroke motion ᅗ 3 Flapping motion ᅗ 4 ࡣ⏥ᆺ⩚ࡤࡓࡁ㣕⾜ᶵࡢࢫࢺ࣮ࣟࢡ㠃ࡢゅᗘ 90[deg]ࡢࡢὶయຊィ ࡢ 1 ࿘ᮇศࡢ⤖ᯝࢆ♧ࡍ㸬ᶓ㍈ࡣ ⩚ࡤࡓࡁ㐠ື 1 ࿘ᮇศࡢ㛫࡛↓ḟඖࡋࡓ↓ḟඖ㛫 T* ཬࡧᐇ 㛫࡛࠶ࡿ㸬⦪㍈ࡣ㸪 ᐃࡋࡓྛ᪉ྥࡢὶయຊ(Ỉ ᖹ᪉ྥࡢὶయຊ Fh㸪ᆶ┤᪉ྥࡢὶయຊ Fv)ࢆ♧ࡍ㸬ࢢࣛࣇ ୰ࡢ◚⥺ࡀ Fh㸪ᐇ⥺ࡀ Fv ࢆ⾲ࡋ㸪Fh ࡣ౪ヨయࢆᢲࡍ᪉ྥ ࡢຊࢆṇ㸪Fv ࡣୖ᪉ྥࡢຊࢆṇࡋࡓ㸬 T*=0.00 ࡢ T.D.C ࡽࡾୗࢁࡋ㐠ືࢆ⾜࠸ጞࡵࡿ㸬ࡑࡢ ࡢ Fv ࡣቑຍࡋጞࡵ㸪Fh ࡣῶᑡࡋጞࡵࡿ㸬⏥ᆺ⩚ࡤࡓ ࡁ㣕⾜ᶵࡣ⩼➃㏆ࡢࡳ⩟⬦ࢆ᭷ࡍࡿ⩼࡛࠶ࡾ㸪ᅗ 3 ࡢ T*=0.09 ཬࡧ T*=0.64 ࡽ㸪⩼ࡣὶయຊࡢᙳ㡪ཬࡧ⩟⬦ࡢ⮬ 㔜ࡼࡾࣇ࢙ࢨࣜࣥࢢ㐠ືࢆ⾜ࡗ࡚࠸ࡿ㸬T*=0.09 ࠾࠸ ࡓࡁ㐠ືࡼࡿ⩼ࡢ័ᛶຊ㸪ᅄ⠇࡚ࡇࢡࣛࣥࢡᶵᵓࣂࢵ ࢸ࣮ࣜࡽࡢືࡶྠィ ࡋ࡚࠸ࡿྍ⬟ᛶࡀ࠶ࡿ㸬 ࡼࡗ࡚㸪࢝ࣥࢳࣞࣂ࣮ࡀὶయຊࡼࡿຊ௨እ࡛ືࡋ࡞ ࠸࢝ࣥࢳࣞࣂ࣮ࡢᮦᩱ㸪ᵓ㐀ࡢ㑅ᐃࡑࡢ๛ᛶࢆቑࡋ㸪ᶵ యࡢ㔜ᚰ࢝ࣥࢳࣞࣂ࣮ࢆྲྀࡾࡅࡿ࡞ࡋ࡚ᨵၿࡍࡿᚲ せࡀ࠶ࡿ㸬ࡲࡓ㸪ᅄ⠇࡚ࡇࢡࣛࣥࢡᶵᵓࡸ⩼ࡢ័ᛶຊࡼ ࡿືࢆᢚไࡍࡿࡓࡵ㸪ࡑࢀࡽࡢືࢆᡴࡕᾘࡍᶵᵓࡀ ᚲせ࡛࠶ࡿ㸬 5㸬⤖ゝ ⏥ᆺ⩚ࡤࡓࡁ㣕⾜ᶵࡢタィ᮲௳㸪ㅖඖ㸪⩚ࡤࡓࡁᶵᵓ ࡢᴫせ㸪⩚ࡤࡓࡁ㐠ືࡢྍどὶయຊィ ࢆ⾜࠸㸪௨ୗ ࡢ⤖ᯝࢆᚓࡓ㸬 52 ឡ▱ᕤᴗᏛ⥲ྜᢏ⾡◊✲ᡤ◊✲ሗ࿌㸪➨ 16 ྕ㸪2014 ᖺ 愛知工業大学総合技術研究所研究報告,第 16 号,2014 年 (1)ᅄ⠇࡚ࡇࢡࣛࣥࢡᶵᵓࡼࡾࠊ⩚ࡤࡓࡁ࿘Ἴᩘ9.3[Hz] ࡛ࣇࣛࢵࣆࣥࢢ㐠ືࢆ⾜࠺⏥ᆺ⩚ࡤࡓࡁ㣕⾜ᶵࡀᡂ ࡋࡓ㸬 (2)⏥ᆺ⩚ࡤࡓࡁ㣕⾜ᶵࡢ⩼࿘ࡾࡢྍど⤖ᯝࡽ㸪⩼⭷ ࡢ⩼➃㏆⩟⬦ࢆ᭷ࡍࡿ⩼ࡣ㸪T.D.CཬࡧB.D.C฿㐩┤ ᚋࣇ࢙ࢨࣜࣥࢢ㐠ືࢆ⾜࠸㸪ࡑࢀࡼࡾ⩼ᚋ⦕ࡽྤ ฟ ࡀⓎ⏕ࡋ࡚࠸ࡿ㸬 (3)⏥ᆺ⩚ࡤࡓࡁ㣕⾜ᶵࡢὶయຊィ ࡽ㸪㸯࿘ᮇࡢ⩚ ࡤࡓࡁ㐠ືࡢ୰࡛Fh㸪Fvඹቑຍῶᑡࡢኚ᭤Ⅼࡀ6⟠ᡤ ࡶ࠶ࡾ㸪ࢫ࣒࣮ࢬὶయຊࢆⓎ⏕ฟ᮶࡚࠸࡞࠸ࡇࡀࢃ ࡗࡓ㸬 (4)⏥ᆺ⩚ࡤࡓࡁ㣕⾜ᶵࡢὶయຊィ ࡣ⩚ࡤࡓࡁ㐠ືᶵ ᵓࡼࡿືࡸ⩚ࡤࡓࡁ㐠ືࡢ័ᛶຊࡶィ ࡋ࡚ࡋࡲ࠺ ࡓࡵ㸪ࡑࢀࡽࡢືࢆᡴࡕᾘࡍᶵᵓࢆ⏝࠸࡚ィ ࡍࡿᚲせ ࡀ࠶ࡿ㸬 ཧ⪃ᩥ⊩ (1) Sir J. Lighthill, "Mathematical Biofluid dynamics", SIAM (1975) (2) C. P. Ellington, "The aerodynamics of hovering insect flight, III. Kinematics", Phi. Trans. of the R. Soc. of London, Vol. 305, No. 1122 , 41-78 (1984) (3) R. Dudley, "The Biomechanics of Insect Flight", Princeton Univ. Press (2000) (4) M. Azhar, et al, “Mimicking unfolding motion of a beetle hind wing”, Chinese Science Bulletin, Vol. 54 , No. 14, 2416-2424 (2009) (5) A. J. Burton, "Directional Change in a Flying Beetle", J. Exp. Bio, 54, 575-585 (1971) (6) H. V. Phan, et al, "Stable Vertical Takeoff of an Insect-Mimicking Flapping-Wing System Without Guide Implementing Inherent Pitching Stability", J. Bio. Eng. 9,391–401, (2012) (7) A. J. Burton, "Nervous control of flight orientation in a beetle", Nature, Land. 204, 1333(1964) (8) M. Okamoto, et al, "Aerodynamic characteristics of the wings and body of a dragonfly", J. Exp. Bio., 199, 281-294 (1996) (9) S. Sunada, et al, "Airfoil characteristics at a low rey-nolds number", J. Flow Visualization & Image Processing, Vol. 7, 207-215 (2000) (10) K. Kitagawa, et al, "Visualization of flapping wing of the drone beetle", J. Visualization, Vol. 12, No. 4, 393-400 (2009) (11) ῝℩㸪ᕝ, "ࢥ࢞ࢿ࣒ࢩ⛉⏥ࡢ㣕⩧ࡢ㠀ᐃᖖὶయ ຊࡢィ ", ➨ 25 ᅇ࢚࣭ࣟࢡࣂ࣓࢜࢝ࢽࢬ࣒◊✲ ㅮ₇㈨ᩱ㞟, 17-18(2010)

© Copyright 2024