
MELSEC LadderSim for Vmech
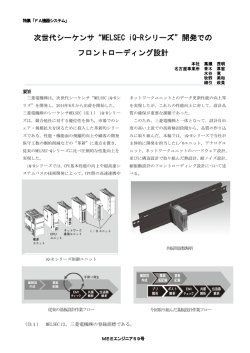
超高速仮想メカトロニクス・シミュレータ Vmechオプション 三菱シーケンサMELSEC 連携オプション 三菱電機 e-F@ctory Alliance パートナー製品 デジタルモックアップによる メカトロニクス制御ソフトウェアの実機レス開発 MELSEC Qシリーズのコントローラに対応 Vmechオプション製品 MELSEC C言語コントローラ MELSEC C-CPUSim MELSEC Q シリーズ シーケンサ ・3D-CADデータ活用 MELSEC MotionSim ・機構定義 ・キネマティクス解析 ・ダイナミクス解析 ・動的干渉解析 ・搬送系モデリング MELSEC LadderSim LADDER開発環境 GxWorks2 シーケンサ接続 : MELSEC MotionSim for Vmech シーケンサによるモーション制御の仮想メカ開発 ■ シーケンサCPU+位置決めユニットおよびモーションCPUによる 制御を仮想メカを使って検証 ロボットCPUの仮想メカ開発 ■ ロボットCPUによるロボット制御を仮想メカで検証、これにより シーケンサ制御とロボット制御の協調動作が検証可能 EzSocketによる通信インタフェース 三菱シーケンサMELSEC 連携オプション お客様の開発環境に合わせた、 ラダー・シミュレータ、仮想メカトロニクスシミュレータと 多種多様なSW開発プラットフォームとの連携 連携したラダーシーケンスの実機レス開発 ラダーシミュレータ連携 : MELSEC LadderSim for Vmech GxWorks/GxWorks2 (MELSOFT)と Vmechの連携により実機レスでラダー開 発・検証 位置決めユニット QD75シリーズ アナログユニット Q64、Q68シリーズ の基本機能をエミュレート EzSocketによる通信インタフェース C言語コントローラ接続 : MELSEC C-CPUSim for Vmech C言語コントローラによるモーション制御の実機レス開発 ■ C言語コントローラによるモーション制御をVmech上の 仮想メカにより検証することが可能 ■ C言語プログラムは、WindRiver社 CW Workbenchの 環境でデバッグ、テストを行うことができるため、既存の SW資産を活用が可能 ソケット(TCP/IP)による通信インタフェース 製品構成 Vmech オプション製品 ①MELSEC LadderSim for Vmech ②MELSEC MotionSim for Vmech ③MELSEC C-CPUSim for Vmech 必要ソフトウェア Vmech Ver5.1以降 GX-Developer 8.74C以降(①のみ) GX-Simulator 7.21X以降(①のみ) GxWokrs2.1.1M以降(②のみ) ライセンス形態 ノードロックまたはフローティングライセンス (Vmech本体のライセンス形態に合わせる) 動作環境 Windows XP (32bit、64bit*1) 日本語版 Windows Vista 32bit 日本語版 Windows 7 (32bit、64bit*1) 日本語版 *1 WOW64サブシステム上で動作 *MELSEC-Q、GXWorks、GXWokrs2は、三菱電機株式会社の登録商標です。 *Vmechは、ラティス・テクノロジー株式会社の登録商標です。 *その他、本資料に記載されている会社名、製品名は各社の商号、登録商標、または商標です。 *本資料の内容は、予告無く変更する場合がございます。 お問合せ先 ラティス・テクノロジー株式会社 Vmech事業本部 〒112-0004 東京都文京区後楽2-3-21住友不動産飯田橋ビル10F [email protected] http://www.lattice.co.jp ©2013 Lattice Technology Co., Ltd. All rights reserved.

© Copyright 2024