
位置測定システムGPSのしくみ(三平方の定理の実用例)
●位置測定システム
位置測定システムGPS
システムGPSのしくみ
GPSのしくみ(
のしくみ(三平方の
三平方の定理の
定理の実用例)
実用例)
(Global Positioning System)
航海では
航海では星
では星の位置から
位置から自分
から自分の
自分の位置を
位置を求めていましたが、
めていましたが、専門の
専門の技術が
技術が必要で
必要で難しいものでした。
しいものでした。そこである
人が、宇宙の
宇宙の人工衛星を
人工衛星を使って地球上
って地球上の
地球上の自分の
自分の位置を
位置を知るシステムを作
るシステムを作ろうと考
ろうと考えました。
えました。
天空の
天空の3つの点
つの点と地球上の
地球上の自分の
自分の位置と
位置との4点でできる三角錐
でできる三角錐(
三角錐(すい)
すい)を考えます。
えます。天空の
天空の3点の位置と
位置と自分
との距離
との距離を
距離を測れば、
れば、三角錐の
三角錐の形が決まり、
まり、自分の
自分の位置を
位置を求めることができます。
めることができます。これは中学
これは中学で
中学で習う『直角三
角形の
角形の三平方の
三平方の定理(
定理(ピタゴラスの定理
ピタゴラスの定理)
定理)』で計算できます
計算できます。
できます。
天空の
天空の3点は、宇宙に
宇宙に打ち上げた位置計測専用
げた位置計測専用の
位置計測専用の GPS 衛星を
衛星を使います。
います。GPS 衛星は
衛星は地上約 20,000_km 以上
の高度で
高度で周回し
周回し、約 12 時間で
時間で一周し
一周し、2009 年末時点で
年末時点で 31 個打ち
個打ち上げられています。
げられています。
Q2(X2
(X2,Y2
,Y2,Z2
,Z2)
Q3(X3
(X3,Y3
,Y3,Z3
,Z3)
Q1(X1,Y1,Z1)
q2
q3
q1
自分の
自分の位置 P(x,y,z)
z
y
地球中心
(0,0,0)
x
- 1 -
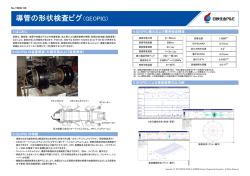
【問題1
問題1】
下図の
下図の直方体の
直方体の対角線 PQ の長さ q を a、b、c を使って式
って式で表しなさい。
しなさい。よく見
よく見かけられる問題
かけられる問題です
問題です。
です。
Q
c
q
b
P
a
【問題1
問題1の答】
2
2
2
q = √(a +b +c )
Q
c
q
2
2
√(a2+b2)
b
P
a
- 2 -
【問題2
問題2】
3次元空間内にある
次元空間内にある2
にある2点 P、Q の座標が
座標がわかりました
わかりました。
りました。
この2
この2点間 PQ の距離 q1 を(x、y、z、X1、
X1、Y1、
Y1、Z1)
Z1)を使って、式で表しなさい。
しなさい。
Q(X1,Y1,Z1)
z
q1
y
P(x,y,z)
x
O(0,0,0)
【問題2
問題2の答】
2
2
2
q1 = √{(X1{(X1-x) +(Y1+(Y1-y) +(Z1+(Z1-z) }
Q(X1,Y1,Z1)
Z1Z1-z
q1
2
Z1
2
√{(X1
{(X1-x) +(Y1
+(Y1-y) }
Y1
Y1Y1-y
X1X1-x
P(x,y,z)
2
y
z
O(0,0,0)
2
2
q1 = √{(X1
{(X1-x) +(Y1
+(Y1-y) +(Z1
+(Z1-z) }
x
X1
- 3 -
GPS システムは、
システムは、【問題2
問題2】で座標原点 O を地球の
地球の中心とし
中心とし、
とし、点 P を自分の
自分の位置、
位置、点 Q を衛星の
衛星の位置とし
位置として
として求
めることができます。
ます。ここでは
ここでは Q の位置が
位置がわかっていて、
わかっていて、点 P の座標値(x
座標値(x、
(x、y、z)が
z)が未知数で
未知数です。
未知数が
未知数が3個なので3
なので3つの式
つの式が必要になります
必要になります。
になります。つまり、
つまり、Q1(X1、
Q1(X1、Y1、
Y1、Z1)、
Z1)、Q2(X2、
Q2(X2、Y2、
Y2、Z2)、
Z2)、Q3(X3、
Q3(X3、Y3、
Y3、
Z3) とそれらとの距離
とそれらとの距離 q1、
q1、q2、
q2、q3 がわかれば計算できます
計算できます。
できます。
結局、
結局、次の3つの式
つの式から座標値(x
座標値(x、
(x、y、z)を
z)を求めれば良いことになります。
2
2
2
2
2
2
2
2
2
2
q1 = (X1-x) + (Y1-y)
+ (Z1-z)
q2 = (X2-x) + (Y2-y)
+ (Z2-z)
q3 = (X3-x) + (Y3-y)
+ (Z3-z)
2
2
Q2(X2
(X2,Y2
,Y2,Z2
,Z2)
Q3(X3
(X3,Y3
,Y3,Z3
,Z3)
Q1(X1,Y1,Z1)
q2
q3
q1
自分の
自分の位置 P(x,y,z)
z
y
地球中心
(0,0,0)
x
【問題3
問題3】
どのようにして衛星
どのようにして衛星 Q と自分 P との距離
との距離を
距離を測定する
測定する?
する?
【問題3
問題3の答】
GPS 衛星には
衛星には、
には、極めて正確
めて正確に
正確に同じ時を刻む原子時計が
原子時計が搭載され
搭載されて
されています。この監視
この監視は
監視は打ち上げ元のアメリ
カで行
カで行われて
われてます。
ます。GPS 衛星は
衛星は、時刻と
時刻と現在位置の
現在位置の情報を
情報を、時時刻刻、
時時刻刻、発信しています
発信しています。
しています。
今、自分の
自分の時計と
時計と GPS 衛星の
衛星の時計の
時計の時刻に
時刻に狂いがなく、
いがなく、全く同じ時刻を
時刻を刻んでいるものとします
んでいるものとします。
GPS 衛星の
衛星の発した時刻情報
時刻情報を
情報を受信した
受信した時
した時の自時計の
時計の時刻と
時刻と、送られてきた時刻情報
時刻情報と
情報との時間差を
時間差を計測すれ
計測すれ
ば距離が
距離が計算できます
計算できます。
できます。つまり、
つまり、
『距離=
距離=時間差 x 電波の
電波の速さ』
で計算できます
計算できます。
できます。電波の
電波の速さは光速
さは光速と
光速と同じ(電波も
電波も光の一種)
一種)で、約 30 万 km/秒
km/秒で、1ナノ秒
ナノ秒(1/10
9
秒 )で
約 30 cm 進みます。
みます。
また GPS 衛星は
衛星は、地上約 2 万 km 以上の
以上の高さを周回
さを周回し
周回し、衛星が
衛星が放つ電波が
電波が地上に
地上に届くまで約
くまで約 0.07 秒(70 ミ
リ秒)かかります
かかります。
ります。
<参考>
参考>
1秒
の 1/100
1/1000
000 は1ミリ秒
ミリ秒。
1ミリ秒
ミリ秒
の 1/100
1/1000
000 は1マイクロ秒
マイクロ秒。
1マイクロ秒
ナノ秒。
マイクロ秒 の 1/100
1/1000
000 は1ナノ秒
- 4 -
【問題4
問題4】
電子技術
電子技術はどこまで
技術はどこまで進
はどこまで進んでいるの?
んでいるの?
【問題4
問題4の答】
人は時計に
時計に合わせて食事
わせて食事や
食事や勉強をしたり
勉強をしたり、
をしたり、テレビを見
テレビを見たりします。
たりします。時計にあわせて
時計にあわせて行動
にあわせて行動しています
行動しています。
しています。コン
ピュータなどの機械
ピュータなどの機械や
機械や装置も
装置も同じで、
じで、リズムを刻
リズムを刻むものがないとうまく動
むものがないとうまく動きません。
きません。
電波(
電波(光)は非常に
非常に速く、電波のキャッチ
電波のキャッチ誤差
のキャッチ誤差をできるだけ
誤差をできるだけ小
をできるだけ小さくするた
さくするために、
めに、受信装置
受信装置側
装置側には十分
には十分な
十分な速さ
が必要となってきます
必要となってきます。
となってきます。
現在の
『1ギガヘルツとは1
現在の電子技術は
電子技術は『ギガヘルツ(GHz)
ギガヘルツ(GHz)』
(GHz)』という速
という速さで動作さ
動作させることができます
できます。
ます。
ギガヘルツとは1秒
9
間に 10 9 回(1000 x 1000 x 1000 回)振動する
振動する速
する速さ』です。
です。
言い換えると、
えると、1回の振動時間
振動時間(
時間(周期)
周期)は『1ナノ秒
ナノ秒=1/10
9
秒』で、コンピュータ回路
コンピュータ回路では
回路では、
では、この1
この1周期
毎に1個ずつ処理
ずつ処理を
処理を実行して
実行して行
して行きます。
きます。
光速は
光速は約30万
30万 km/秒
km/秒、1ナノ秒当
ナノ秒当り
秒当り約30cm
30cm 進みます。
みます。1ナノ秒
ナノ秒の電波キャッチの
電波キャッチの誤差
キャッチの誤差は
誤差は30c
30cm となり
ますが
ますが、かなり小
かなり小さな誤差
さな誤差と
誤差となってき
なってきました。
ました。
【問題5
問題5】
【問題3
問題3】では、
では、自分の
自分の持っている時計
っている時計の
時計の時刻と
時刻と GPS 衛星の
衛星の時計の
時計の示す時刻が
時刻が誤差なく
誤差なく一致
なく一致している
一致していると
していると仮
定しましたが、
しましたが、実際には
実際には、
には、自分の
自分の持っている時計
っている時計の
時計の時刻と
時刻と GPS 衛星の
衛星の時計の
時計の示す時刻と
時刻とは同じでは
じではありませ
ん。ズレ(
ズレ(時刻差
時刻差)があります。
があります。どうすれば良
どうすれば良いでしょう?
いでしょう?
【問題5
問題5の答】
時刻差(t)
時刻差(t)を
(t)を4つ目の未知数とし
未知数として
として、この未知数
この未知数を
未知数を解決するためにもう
解決するためにもう一
するためにもう一つの GPS 衛星を
衛星を使います。
います。
つまり4
つまり4個の衛星との
衛星との距離
との距離を
距離を計測することで
計測することで、
することで、自分の
自分の位置を
位置を求めることができます
めることができます。
ます。
衛星との
衛星との時刻
との時刻差
時刻差も求めることができ、
めることができ、正確な
正確な時計も
時計も作ることができます。
ることができます。
今、
・自分の時計の
時計の時刻 T1 に、衛星 Q1 の情報(X
情報(X1
(X1、Y1、Z1、T0 )が、
・自分の時計の
時計の時刻 T2 に、衛星 Q2 の情報(X
情報(X2
(X2、Y2、Z2、T0 )が、
・自分の時計の
時計の時刻 T3 に、衛星 Q3 の情報(X
情報(X3
(X3、Y3、Z3、T0 )が、
・自分の時計の
時計の時刻 T4 に、衛星 Q4 の情報(X
情報(X4
(X4、Y4、Z4、T0 )が、
受信できた
受信できたものとすれば
できたものとすれば、
ものとすれば、次の4つの式
つの式が成立し
成立します。
ます。
2
2
2
2
2
2
2
2
2
2
2
2
・q1 = (X1
(X1-x) + (Y1
(Y1-y)
・q2 = (X2
(X2-x) + (Y2
(Y2-y)
・q3 = (X3
(X3-x) + (Y3
(Y3-y)
・q4 = (X4
(X4-x) + (Y4
(Y4-y)
2
2
2
2
2
2
2
2
+ (Z1
(Z1-z) = {(T1
{(T1-T0+t)*C}
+ (Z2
(Z2-z) = {(T2
{(T2-T0+t)*C}
注)『*』は乗算記号とします
乗算記号とします。
とします。
(『座標 x』と混同しないように
混同しないように)
しないように)
+ (Z3
(Z3-z) = {(T3
{(T3-T0+t)*C}
+ (Z4
(Z4-z) = {(T4
{(T4-T0+t)*C}
ここで、
ここで、
・q1、
q1、q2、
q2、q3、
q3、q4 は自分と
自分と各 GPS 衛星までの
衛星までの距離
までの距離で
距離で、C は電波の
電波の速度(
速度(約 300,000_km/sec)です
300,000_km/sec)です。
です。
・t は自分の時計と
時計と GPS 衛星の
衛星の時計と
時計との時刻差(
時刻差(未知数)
未知数)です。
です。
・T0 は原子時計
原子時計で非常に
非常に高い精度で
精度で刻まれた時刻
まれた時刻で
時刻で、GPS 衛星全てが
衛星全てが同時
てが同時に
同時に同じ時刻を
時刻を指すようにコント
ロールされています。
ロールされています。
上記4
上記4つの式
つの式から座標値
から座標値(x
座標値(x、
(x、y、z)を
z)を求めれば、
めれば、あとは地図
あとは地図上
地図上に表示するの
表示するのみ
するのみ。これがナビゲーションのしく
これがナビゲーションのしく
みです
みです。直角三角形の
直角三角形の『三平方の
三平方の定理(
定理(ピタゴラスの定理
ピタゴラスの定理)
定理)』を基に、いろいろな工夫
いろいろな工夫や
工夫や知恵を
知恵を組み合わせて
実現されて
実現されている
されていることが
いることがわか
ことがわかります
わかります。
ります。
- 5 -

© Copyright 2024