
3.デジタル回路(講義資料) - 電気電子工学科
平成26年9月19日版
集積電子回路設計
Part 3:デジタル回路
千葉大学工学部電気電子工学科
橋本研也
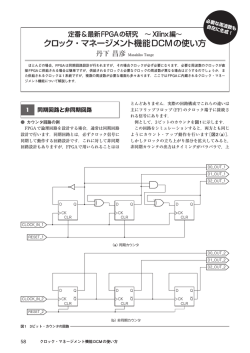
論理回路
A
B
A
B
Y
Y=AB=A+B
A
B
A
L
H
L
H
Y
L
L
L
H
Y
Y=A+B=AB
Y
B
L
L
H
H
A
B
Y
A
B
A
L
H
L
H
Y=A+B=A+B
Y
B
L
L
H
H
Y
L
H
H
H
A
B
A
L
H
L
H
Y
B
L
L
H
H
Y
L
H
H
L
セレクタ
A
0
B
0
A
1
1
2
3
sel
sel
H
L
L
sel
A
x
L
H
_
0
H
L
L
_
1
H
L
H
sel
H
L
L
L
L
A
x
L
H
L
H
B
x
L
L
H
H
_
0
H
L
H
H
H
_
1
H
H
L
H
H
_
2
H
H
H
L
H
_
3
H
H
H
H
L
デュプレクサ
A
Rp
Y
Y
A
B
B
sel
sel
L
L
H
H
A
L
H
x
x
B
x
x
L
H
Y
L
H
L
H
sel
3ステートバッファによる実現
(多くの多重化容易)
入出力回路
+5V
マイクロ
コンピュータ
Rp
SW1
RB
Y
通常の論理ICはGNDへの
電流流出により“L”を判定
無接続の入力は “H”と判
定
RC
A
I LED
5 VBE VLED
RC
VLED: LEDの順方向電圧降下
RB(<VBE /ILED) : ベース電流の制限
シュミットトリガ回路
eout
Rb
V+
Ra
ein
eout
V-
eout
V
V
Ra eout Rb ein
Vt
Ra Rb
Ra eout Rb ein
Vt
Ra Rb
V+:”H”出力、 V-:”L”出力
Vs- Vs+
ein
シュミットトリガの入出力特性
Vs+=Vt/(1+Rb/Ra)-V-Rb/Ra
Vs-=Vt/(1+Rb/Ra)-V+Rb/Ra
マルチバイブレータ
Vc+
ec
Ra
R
ec
V+
Vt
C
eout
V0
Vc-
t
マルチバイブレータの波形
青曲線を表す式(T=CR)
V V (Vo V ) exp(t / T )
Vo Vt (V V )
2T log(Vo V ) /(Vt V )
2T log 3 2.2T
eout
(Vt=(V++V-)/2の時)
ワンショットマルチバイブレータ
R
ein
C
ein
Ra
eout
ec
V+
Vt
VV+
eout
青曲線を表す式(T=CR)
V-
V V (V V ) exp( t / T )
T log(V V ) /(Vt V )
T log 2 0.69T
ecut
(Vt=(V++V-)/2の時)
t
半加算器
HDL(Hardware Description
Language) verilogによる構造記述
W0
W1
A
B
C
S
module halfadder(s, c, a, b);
input a, b;
output s, c;
入出力,ワ
W2
イヤの定義
wire w0, w1, w2;
A
L
L
H
H
B
L
H
L
H
S
L
H
H
L
C
L
L
L
H
論理積 assign w0 = a&b,
w1 = ~w0,
否定
論理和
w2 = a|b,
s = w1 & w2,
論理積
c = w0;
endmodule
相互接続の
定義
全加算器
A
B
Ci
半加算器I0
半加算器I1
A
L
L
L
L
H
H
H
H
B
L
L
H
H
L
L
H
H
Ci
L
H
L
H
L
H
L
H
W1
W0
W2
S
L
H
H
L
H
L
L
H
Co
L
L
L
H
L
H
H
H
HDL(Hardware Description
Language) verilogによる構造記述
module fulladder(s, co, a, b, ci);
input a, b, ci;
Co output s, co;
入出力,ワ
S
イヤの定義
wire w0, w1, w2;
halfadder I0 (.s(w0), .c(w1),
.a(a), .b(b));
halfadder I1 (.s(s), .c(w2),
.a(w0), .b(ci));
assign co = w1 | w2;
endmodule
下位モ
ジュール
の相互接
続の定義
4bit加算器
Ci
A0
B0
A1
B1
A2
B2
A3
B3
全加算器I0
S0
W0
全加算器I1
S1
W1
全加算器I2
全加算器I3
S2
W2
S3
Co
module adder4(s, co, a, b, ci);
input [3:0] a, b;
4bitデータ
input ci;
バスの定義
output [3:0] s;
output co;
wire w0, w1, w2;
ワイヤの定義
fulladder I0 (.co(w0), .s (s[0]),
.a(a[0]), .b(b[0]), .ci(ci));
fulladder I1 (.co(w1), .s (s[1]),
.a(a[1]), .b(b[1]), .ci(w0));
fulladder I2 (.co(w2), .s (s[2]),
.a(a[2]), .b(b[2]), .ci(w1));
fulladder I3 (.co(co), .s (s[3]),
.a(a[3]), .b(b[3]), .ci(w2));
endmodule
下位モ
ジュール
の相互接
続の定義
動作試験のためのモジュール(結果を次々加算)
begin
a = 4'b0001;
b = 4'b0001;
2進数の代入
reg [3:0] a, b; データを収
ci = 1'b0;
reg [7:0]count; 納するメモ
リに定義 $monitor("%t %b %b %b",$time,s,a,b,co);
reg ci;
for (count=0; count<=7; count=count+1)
wire [3:0] s;
begin
wire co;
#10 b = a;
a = s;
時間10お休み
initial
end
$finish;
最初にする仕事
終わり
end
module testadder4;
結果の
出力
7回反復
は以下の通り
adder4 inst0 (s,co,a,b,ci);
endmodule
始めはこのモ
ジュールから
VeriLogger Proによる
シミュレーション結果
(桁あふれに注意)
4bit加算器
Ci
A0
B0
A1
B1
A2
B2
A3
B3
全加算器I0
HDL(Hardware Description
Language) verilogによる動作記述
S0 module adder4(s, co, a, b, ci);
input [3,0] a, b;
input ci;
W0
全加算器I1
S1
W1
全加算器I2
全加算器I3
記述は簡単だが、
最適なhardwareが
組み上がるか不明
S2
W2
output [3,0] s;
output s, co;
reg [3:0] s;
reg co;
動作を保管するレジス
タの定義
S3
Co always (a or b or ci) begin
[co,s] = a + b + ci;
end
endmodule
a,b,ciが変化
した時は常に
SR(Set-Reset) フリップフロップ
S
_
Q
R
Q
S
H
H
L
R
H
L
H
L L
_
S
_
R
Q
_
Q
Q
L
H
L
H
L
_
Q
L
L
H
L
H
HH→LLの遷移の結果
は?
早い者勝ち!=実装や
素子によって不定
SW1
Rp
_
S
_
Rp Rp R
Q
Rp
SW2
_
R
SW
_
Q
スイッチのばたつき
(チャタリング)
SW2
Q
Q
t
Q
_
S
_
R
_
S
SW1
_
Q
スイッチのばたつき
(チャタリング)
t
クロック付きSRフリップフロップ
_
Q
S
S
S
_
Q
Q
clk
R
R
_
Q
Q
Q
clk
clk
R
S
_
Q
Q
R
clk
マスタ・スレーブ型
クロックが“H”から“L”に変化し
た時のデータを保持
クロックが“H”から“L”に変化し
た時のデータを保持
クロック“H”の時に出力変化
それ以外では出力変化せず
JKフリップフロップ
_
Q
J
Q
K
J
_
Q
K
Q
clk
clk
J(S) K(R) Qn
_
H H
Qn-1
H L
H
L H
L
L L
Qn-1
pre
_
Qn
Qn-1
L
H
_
Qn-1
Qn-1 :1クロック前の出力
clr
preset(set):クロックに関わ
らず強制的にQ=H
clear(reset):クロックに関わ
らず強制的にQ= L
ラッチ(Dフリップフロップ)
次のクロック入力まで
データ保持=メモリ
RC
D
J
K
pre
Q
_
Q
RB
D
pre
Q
_
Q
clr
clr
clk
clk
D
Q 0 0 11 1 0 1 1 1 0 0 0 1 1 0 0 0 1 0 0 0 0 1 1
t
Serial-Parallel変換(シフトレジスタ)
Q1
D
J
K
pre
clr
Q J
_
Q K
Q2
pre
clr
Q J
_
Q K
Q3
pre
clr
Q
_
Q
クロック入力から出力
変化までに遅延有り
clr
clk
clk
D
Q1 0 0 1 1 1 0 1 1 1 0 0 0 1 1 0 0 0 1 0 0 0 0 1 1
Q2 0 0 0 1 1 1 0 1 1 1 0 0 0 1 1 0 0 0 1 0 0 0 0 1
Q3 0 0 0 0 1 1 1 0 1 1 1 0 0 0 1 1 0 0 0 1 0 0 0 0
t
Parallel-Serial変換(シフトレジスタ)
D1
D2
D3
ld
Sin
clk
pre
J Q
_
K Q
clr
pre
J Q
_
K Q
clr
pre
J Q
_
K Q
clr
Sout
2進数(Binary)カウンタ
pre
J Q
_
K Q
clr
clk
clr
pre
J Q
_
K Q
clr
Q0
pre
J Q
_
K Q
clr
Q2
Q1
clk
Q0 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
Q1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1
Q2 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1
t
二進化十進数(Binary-Coded Decimal)カウンタ
Q0
clk
J Q
_
K Q
Q1
J Q
_
K Q
Q2
J Q J Q
_
_
K Q K Q
Q3
Q'2
clk
Q0 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
Q1 0 0 1 1 0 0 1 1 0 0 0 0 1 1 0 0 1 1 0 0 0 0 1 1
Q2 0 0 0 0 1 1 1 1 0 0 0 0 0 0 1 1 1 1 0 0 0 0 0 0
Q'
2
Q3 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 1 1 0 0 0 0
t
ストップウォッチの回路構成
•クリアパルスの入力で、カウンタをクリア
•セットパルスの入力から、計測開始
③
•リセットパルスの入力で、計測終了
①
Reset
Set
基準クロック
②
Q (gate)
BCDカウンタ
Q1 Q2 Q3 Q4
CLR
BCDカウンタ
Q1 Q2 Q3 Q4
CLR
BCDカウンタ
Q1 Q2 Q3 Q4
液晶ディスプレイ
CLR
クロック用発振回路
eout
C1
eout
C2
音叉型水晶振動子
ein
インバータの入出力特性
反転増幅器と等価!
215 =32,768Hz を215分周すれば1Hz!
高安定プログラマブル発振器 (v=Ms/N)
位相検波器
s
N分周器
LPF
Amp
ed
v
VCO
M分周器
Phase-Locked Loop (PLL)
VCO:電圧制御発振器(Voltage Controlled Oscillator)
• 高安定発振源sによる制御 ⇒ 高精度、高安定
• 分周器をプログラム可能 ⇒ 可変
S水晶発振器による発生
高精度モータ
DCモータ+回転検出センサ
ミキサ(排他的論理和)とLPFの役割(位相検出)
A
B
A+ B
LPF
通過後
閉ループ利得大で、負帰還がか
かっている時、差動入力は零
t
PLLロック時AとB
は90度の位相差
周波数カウンタを作ってみよう
•計測区間内のパルス数をカウント
•計測後、結果をラッチに保存
•カウンタをクリア
clk
S
Q4
基準クロック
計測開始
計測終了
計測区間
Q(gate)
データラッチ
カウンタクリア
LD
CLR
t
周波数カウンタの回路構成
基準クロック
CLK
reset
reset
BCDカウンタ BCDカウンタ
Q4
reset
BCDカウンタ
Q4
Q4
reset
LD
set
DQ
Q (gate)
reset
CLK
reset
BCDカウンタ BCDカウンタ
Q1 Q2 Q3 Q4
LD
D1 D2 D3 D4
Q1 Q2 Q3 Q4
Q1 Q2 Q3 Q4
LD
D1 D2 D3 D4
Q1 Q2 Q3 Q4
reset
BCDカウンタ
Q1 Q2 Q3 Q4
LD
D1 D2 D3 D4
Q1Q2 Q3 Q4
液晶ディスプレイ
reset
DQ
set
設計されたカウンタ回路
シミュレーション結果
HDL(Hardware Description Language)による論理回路設計
module jkflipflop(out,outbar,j,k,clk,res);
output out,outbar;
入出力線,内部
input j,k,clk,res;
レジスタの定義
reg q;
always @(negedge clk or negedge res)
begin
if(!res)
begin
q <= 0;
end
else
resが偽(0)の時
q=0の代入(リセット動作)
その他の時
JKフリップフロップの
Verilog-HDLによる記述
clkの立ち下がりもしくは
resの立ち下がりの時
低レベル機能の
モジュール化
if(j==1)
if(k==1)
begin
q <= ~q;
end
else
begin
q <= 1;
end
else
if(k==1)
begin
q<= 0;
end
end
assign out=q;
assign outbar=~q;
endmodule
もしj=1ならば
もしk=1ならば
J=K=1の時、qの反転
J=1でK=0の時、q=1
もしk=1ならば
J=0でK=1の時、q=0
always構文の終了
出力信号の定義(常時接続)
BCDフリップフロップの
Verilog-HDLによる記述
module bcdcounter(out,clk,res);
output [3:0] out;
input clk,res;
wire q3,qbar0,qbar1,qbar2,qbar3,a;
assign a=1;
相互接続線の定義
a=1(常時接続)
jkflipflop I0 (.out(out[0]),.outbar(qbar0),.j(a),.k(a),.clk(clk),.res(res));
jkflipflop I1 (.out(out[1]),.outbar(qbar1),.j(qbar3),.k(a),.clk(out[0]),.res(res));
jkflipflop I2 (.out(out[2]),.outbar(qbar2),.j(a),.k(a),.clk(out[1]),.res(res));
jkflipflop I3 (.out(q3),.outbar(qbar3),.j(out[2]),.k(qbar2),.clk(out[0]),.res(res));
assign out[3]=qbar2&q3;
endmodule
モジュー
ル間の相
互接続の
定義
qbar2とq3の&をoutと定義(常時接続)
論理積
モジュールを組み合わせ
て高機能のモジュール化
module bcdtest;
wire [3:0] out;
reg set,clk,res;
2進数で表示
initial
begin
$monitor("%t %b %b %b",$time,clk,res,out);
clk <=0;
res <=0;
#40
時間40休止
res <=1;
#350
時間350休止
$finish;
これ終わり
end
試行用信号源の
Verilog-HDLによる記述
出力データとその出力
形式の定義
初期動作の定義
always #10
begin
時間10毎の動作
clk<= ~clk;
clkの否定(clkの作成)
end
bcdcounter inst0 (out,clk,res);
endmodule
VeriLogger Pro Student Versionによるシミュレーション結果
駄目な場合
Field Programmable
Logic Array (FPGA)
によるハードウェア化
カスタムLSIによ
るハードウェア化
FPGAやカスタム Intellectual Property
(IP)としての権利化・
LSIへの実装
販売(例: CPUコア)
アナログモデルでの
シミュレーション(信号
の遅延、鈍り等考慮)
トリガ入力後、クロックに同期した
パルスを4個出力するためには?
clk
入力クロック
trig
入力トリガ
この区間だけ出力
Q0
Q1
パルスを4
個数える
Q2
Q3
最後のパルス
リセット信号
out
出力信号
t
トリガ入力後、クロックに同期した
パルスを4個出力する回路
R
Q0
OUT
trig
clk
J
J
Q
Q
Q
_
_
_
K Q
K Q KCLR
Q
CLR
CLR
Q1
Q2
実は後述のverilogHDLで最初に設計し、
後にHardware化
J
Q3
動くかどうかはシミュレータで実証!
思いもかけない入力もありえる
HDL(Hardware Description Language)による論理回路設計
module rsflipflop(out,outbar,set,res);
RSフリップフロップの
output out,outbar;
入出力線,内部
input set,res;
Verilog-HDLによる記述
レジスタの定義
reg q;
always @(posedge set or posedge res)
setの立ち上がりもしくはresの
begin
立ち上がりの時
if(set=1)
begin
動作の定義
q <= 1;
end
set=1の時q=1
else
set=0の時q=0
begin
q <= 0;
end
end
assign out=q;
出力信号の定義
assign outbar=~q;
endmodule
module pulse4out(out,clk,trig,res);
4bitデータ
output out;
入出力線,相互
input clk,res,trig;
接続線の定義
wire [3:0] q,qbar;
wire clk2,a;
assign a=1,clk2=res&~q[3];
resとq[3]の否定の&をclk2と定義
rsflipflop I0 (.out(q[0]),.outbar(qbar[0]),.set(trig),.res(~clk2));
jkflipflop I1 (.out(q[1]),.outbar(qbar[1]),.j(q[0]),.k(a),.clk(clk),.res(clk2));
フリップフ
jkflipflop I2 (.out(q[2]),.outbar(qbar[2]),.j(q[0]),.k(a),.clk(q[1]),.res(clk2)); ロップ間の
jkflipflop I3 (.out(q[3]),.outbar(qbar[3]),.j(q[0]),.k(a),.clk(q[2]),.res(clk2)); 相互接続
assign out=q[0]&clk;
endmodule
q[0]とclkの&をoutと定義
低レベル機能を利用した高
次機能モジュールの実現
複雑機能のモジュール化
試行用信号源のVerilog-HDLによる記述
module pulse4;
wire out;
reg clk,res,trig;
initial
begin
$monitor("%t %b %b %b",$time,clk,trig,out);
clk <=0;
res <=0;
trig <=0;
#40
res <=1;
#25
trig <=1;
#5
trig <=0;
VeriLogger Pro Student
Versionによるシミュレー
ション結果
#100
trig <=1;
#5
trig <=0;
#100
$finish;
end
always #10
begin
clk<= ~clk;
end
pulse4out inst0 (out,clk,trig,res);
endmodule
Trig
OrCAD PSPICE
A/D SVによるシ
ミュレーション結果
Reset:FFの初期値
設定(これが無いと
シミュレータが怒る)
Clk
Trigのタイミングによっ
てパルス数が変化!
機械同士でデータを交換する(非同期通信)
Strobe
ホスト
Ready
周辺機器
Nビット分のデー
タ(Data Bus構造)
data
Ready
Strobe
data
•周辺機器が準備できるまで待機
•データ出力(データからだけでは
データが出ているか否か判定不能)
•ストローブ信号を出力
t
CPU
CLK
enable
Read/Write
address
data
(同期通信)
•クロックもしくはセレクト信号に
同期したデータ出力
メモリ
•読み書き動作
•アドレス設定
clk
enable
Read/Write
address
data
t
バス構造
同一配線を選択されたもの同士が利用
アドレ
スバス
データ
バス
コントロー
ルバス
CPU
Memory1
Memory2
Memory3
enable
Read/Write
必要に応じてユニットを追加・削減可能
3ステートバッファ
A
Y
C=“L”の時
Y
A
C
C
H
H
L
A
H
L
x
Y
H
L
high-Z
high-Z :無接続と同等
C
C=“H”の時
双方向性バッファ
オープンコレクタ
Rp
シュミットトリガ
Y
A
人間を相手にする以上間違いを考慮した設計(Fail Safe)
•配線切断(もしくは無接続)の状態ではどうなるか?
•GNDとの短絡ではどうなるか?
•配線間の短絡ではどうなるか?
高級言語Cによるプログラム例
#include <stdio.h>
おまじない(利用する関数群の定義)
int main(int argc, char **argv[])
このプログラム(関数)から
{
スタート
int count, cmax;
変数(整数)と初期値の定義
int sum = 0;
変数cmaxの収納場所
scanf("%d",&cmax);
cmaxの読み込み(10進数形式)
for (count = 1; count <= cmax ; ++count){
sum = sum+count; (sum += count;と標記可)
printf("count = %d, sum = %d¥n", count, sum);
}
return (0);
終了するとき0を返す
}
1からcmaxま
で順次加算
countとsumの出
力(10進数形式)
行替え
lcc-win32でcompileして実行した結果
入力
高級言語CによるBCDカウンタの動作実現
#include <stdio.h>
int bcdcount(int, int, int);
int main(int argc, char **argv[])
{
int count, countmax;
int clock = 1, reset = 1;
}
おまじない(利用する関数群の定義)
使用する関数(moduleと等価)の定義
ここからスタート
変数と初期値の定義
for (count = 0; count <= 5 ; ++count){
clock = -clock;
clkの否定(clkの作成)
out = bcdcount(clock,reset,in);
in=out;
printf("time = %d, clock = %d, out = %d¥n", count, clock, out);
}
reset = 0;
scanf("%d",&countmax);
countmaxの読み込み
for (count = 0; count <= countmax ; ++count){
clock = -clock;
clkの否定(clkの作成)
out=bcdcount(clock,reset,in);
in=out;
printf("time = %d, clk = %d, out = %d¥n", count, clock, out);
}
return (0);
時間5まで
reset=1
countmaxまで
reset=0
int bcdcount(int clock, int reset, int in)
{
int out;
if( reset == 1 ) { out = 0 ;} else {
if( clock == -1 ) {out = in +1 ;} else {
out=in ;
}
}
return out;
}
int updowncount(int clock, int reset, int a, int b, int in)
{
int out;
if( reset == 1 ) { out = 0 ;} else {
if( clock==-1) {
if( a == 1 & b==0) {out = in +1 ;}
if( b == 1 & a==0) {out = in -1 ;}
} else {
out =in ;
}
}
return out;
}
reset付BCDカウンタ
reset付updownカウンタ
lcc-win32で
compileして実
行した結果
updown.c
入力
デジタル(Finite-Impulse-Response; FIR)フィルタ
ein
a0
: 1clk遅延
a1
a2
a3
a4
+
+
+
+
N 1
eout (t ) an ein (t n )
n 0
eout
N 1
H ( z ) an z n
n 0
デジタルシグナルプロセッサ(DSP)による処理
ei
ADC
DSP
DAC
eo
離散系信号処理(その1)
ei
+
eo
z-1
a
1クロック遅延 = z-1
eo (nT) ei (nT) aei{(n 1)T}
1
1
Eo (z) Ei (z) az Ei (z) {1 az }Ei (z)
1
H(z) 1 az
デジタルフィルタ=数値計算によるフィルタリング
Finite Impulse Response (FIR) フィルタ
ei
z-1
a0
z-1
z-1
z-1
a1
a2
a3
a4
+
+
+
+
H ( z)
N 1
eo
an z n
n 0
位相直線性が可能、しかし多くの段数を必要
離散系信号処理(その2)
ei
+
eo
z-1
a
無限インパルス応答
(IIR)フィルタの一例
eo (nT) ei (nT) aeo{(n 1)T}
1
Eo (z) Ei (z) az Eo (z)
1
H(z)
1
1 az
1
H()
1 aexp( jT)
Infinite Impulse Response (IIR) フィルタ
ei
+
+
+
+
-b4
-b3
-b2
-b1
z-1
H ( z ) 1
z-1
z-1
N
b z
n
n 1
eo
z-1
1
n
短い演算で急峻な周波数特性可能
ただし、線形位相実現せず
デジタルフィルタの一般形
ei
z-1
a0
z-1
z-1
a2
a1
z-1
a3
N
a4
H ( z)
n
a
z
n
n 0
N
1 bn z
n 1
+
+
+
+
-b4
-b3
-b2
-b1
z-1
z-1
z-1
eo
z-1
n
平均値フィルタ
1 N1
eo (mT) ei{(m n)T}
N n0
有限インパルス応答
(FIR)フィルタの一例
N
1
z 1
n
H(z) z
N(z1 1)
N n0
N1
sin( NT / 2)
H ( ) exp{ j ( N 1)T / 2}
N sin(T / 2)
線形位相:遅延が周波数に依存せず
Relative amplitude in dB
0
sinNx/Nsinx
-5
sinNx/Nx
-10
-15
-20
-25
-30
-35
-40
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
Relative frequency
スペクトラムの
折り返しの影響
zN 1
z=exp(jT)であるから Z e(t ) 1
は?
z 1
exp( jNT ) 1
E ( )
exp( jT ) 1
sin( NT / 2)
N exp{ j ( N 1)T / 2}
単一パルスの
N sin(T / 2)
離散化版
sin( NT / 2)
N exp{ j ( N 1)T / 2}
( NT / 2)
パルス中心の
ずれ:(N-1)T/2
連続関数と離散化関数で何故違う?
窓関数
ブラックマン関数:w(t)=0.42+0.5cos(2t/T) +0.08cos(4t/T)
ブラックマン・ハリス関数:w(t)=0.35875+0.48829cos(2t/T)
+0.14128cos(4t/T)+0.01168cos(6t/T)
0
1
rectangular
Hamming
Blackmann
-20
Blackmann-Harris
0.8
-40
0.6
-60
0.4
Hamming
-80
Blackmann
0.2
Blackmann-Harris
-100
0
-1-0.8-0.6-0.4-0.2 0 0.20.40.60.8 1 -1200
2
4
6
8
Relative position
Relative frequency
Amplitude in dB
Weight
hd(t)を有限時間で打ち切るための関数:w(t)
ハミング関数w(t)=0.54+0.46cos(2t/T)
帯域外抑圧と帯域幅はトレードオフ
10
0
-10
-20
-30
-40
-50
-60
-70
0
0.05
0.04
0.03
0.02
0.01
0
-0.01
-0.02
-0.03
-0.04
-0.05
2
Transfer function in dB
Transfer function in dB
レメッツ交換法による設計結果
0.5
1
1.5
Relative frequency
手法提案の論文に設
計プログラムが添付
⇒ 世界中に普及
許容リップルと最も狭
い遷移帯域幅で必用
なタップ数を推定可能
(Infinite-Impulse-Response; IIR)フィルタ
ein
a0
+
+
+
+
b4
b3
b2
b1
N
eout (t ) a0 ein (t ) bn eout (t n )
n 1
eout
: 1clk遅延
H ( z)
a0
N
1 bn z n
n 1
・少ないタップで良好な遮断特性可能(ただし最少位相推移系)
・係数によっては発振(安定条件:全ての極が|Z|<1)
・FIRと組み合わせて、少ないタップで、位相特性、周波数特性
共に良好なフィルタ実現
平均値フィルタの構成タップの場合
新データ
temp=clock/TAP;
切捨て演算
position=clock-temp*TAP+TAP;
余りの算出
data[position]=in;
data[position-TAP]=in;
for (count = 0 ; count < TAP ; ++count)
{
sum += data[position-count];
}
result = sum/TAP;
総和
次々と下
に移動
新データ
タップ数での
割り算
return result;
}
下まで行ったら
一番上
00
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
この範囲を加算
int average(int clock, int in)
{
int position, count, temp, result;
long int sum = 0;
32bit整数
#include <stdio.h>
#define TAP 8
#define TMAX 20
定数の定義
int average(int, int);
int data[2*TAP];
共用の変数を定義
int main(int argc, char **argv[])
{
int count, period, out;
int in=0, clock=0;
4回繰り返し
TMAX回繰り返し
for (period =1 ; period <=4 ; ++period) {
for (count = 1 ; count <= TMAX ; ++count) {
傾斜型
++clock;
clockを1ずつ増加
in += 5;
inを5ずつ増加
波形の
out=average(clock,in);
関数averageの実行
形成
printf("%d, %d, %d¥n", clock, in, out);
}
以下省略
TAP=4の結果
TAP=8の結果
計算結果を
gnuplotで表示
TAP=16の結果
TAP=32の結果
マイクロプロセッサの構成例
CPU
Register A
Register B
Register C
Register D
control
lines
ALU
status
register
Instruction
decoder
Stack
pointer
Program
counter
Address
Register
Clock
Interrupt
unit A
Reset
Interrupt
unit B
Interrupt
Instruction
register
CPU: Central Processing Unit
ALU: Arithmetric Logical Unit
Read Write
Data bus
Address bus
多少高級な言語(アセンブラ)での記述
1.
2.
3.
4.
5.
LD A, 30H (16進数で30をレジスタAに代入)
DEC A (Aの内容を1つ減少)
JNZ 09H (演算結果が"0"で無い場合アドレス09Hにジャンプ)
LD 50H, B (レジスタBの内容をアドレス50Hに代入)
JMP 30H (アドレス30Hへジャンプ)
機械語への変換
アドレス データ
00
20 30
機械語での表現
02
51
03
25 09
05
32 50
07
20 30
プログラム実行の流れ
resetされた時
の開始場所
結果が
0の時
基本的には逐次実行
00H(20H)
01H(30H)
02H(51H)
03H(25H)
Jump
04H(09H)
05H(32H)
06H(50H)
07H(20H)
08H(30H) データ
09H(00H) の収納
0AH(18H)
0BH(2CH)
0CH(33H)
0DH(FCH)
0EH(35H)
30H
31H
32H
33H
34H
35H
36H
50H
51H
52H
53H
54H
データも同
じ空間上
に展開
サブルーチン(例:三角関数の計算)
スタック構造
00H
30H
①
01H
31H
ポインタ
02H
32H
の位置
call 30H 03H
33H call 50H
②
34H
④
04H
34H
③①
04H
②
05H
35H
④
06H
36H return 50H
07H
③
51H
08H
52H
call 30H 09H
53H
0AH
54H return
call 50H 0BH
0CH •call: ポインタ1増+ポインタ位置に戻りアドレス収納
0DH +指定アドレスへジャンプ
0EH
•return: ポインタ位置のアドレスに移動+ポインタ1減
割り込み処理(例:キーボードが押された場合)
割り込み
発生
割り込み
発生
00H
01H
02H
03H
04H
05H
06H
07H
08H
09H
0AH
0BH
0CH
0DH
0EH
①
②
③
④
複数機器の同時
30H
の制御等に有効
31H
32H
33H
34H
35H
36H return
1. 現在の処理終了後→ 割り込み
禁止+ポインタ1増+ポインタ位
置に戻りアドレス収納+指定ア
ドレスにジャンプ
2. return: ポインタ位置のアドレスに
移動+ポインタ1減+割り込み
禁止解除
© Copyright 2026