
プレゼン資料
DAPsを用いた高精度追尾技術
に関する研究
呂 暁東、古賀 禎
電子航法研究所
2014年6月5日
2
目次
1.背景
2.監視技術
3.Mode Sレーダ
4.高精度追尾システム
5.評価実験
6.まとめ
3
背景
SAT NAV
SAT COM
ADS-B
ADS-C
ADS-B
ADS GS
・ 航空機の増加
・ 新しい監視システムの出現
ATC Center
SAT GS
MLAT/WAM
VHF GS
PSR
SSR
4
背景
Technology
ADS-B Technology
Full Dependent
ADS-B (Automatic Dependent Surveillance-Broadcast)
Multilateration Technology
WAM (Wide Area Multilateration)
Semi Dependent
Mode A/C Mode S Radar
SSR (Secondary Surveillance Radar)
ASDE / Surface Movement Radar
Non Dependent
Primary Radar
Year
1960s-70s
1980s-90s
2000s
2010s
5
監視技術の比較
SSR
Mode S
Multi
lateration
ADS-B
Integrity
Update Rate
Accuracy
Data Link
○
△
△
○
Range: 250NM Antenna
Probability of
rotation time:
detection: >97% 4s~12s
△
Based on the
location of
ground stations
△
Range: 250NM
Not all aircrafts
are equipped
○
Range: 30m
Azimuth:
<0.06deg
○
Refresh period: Based on the
<= 1s
location of
ground stations
○
○
Refresh period: Position: 10m
<= 1s
Altitude: 25fts
Downlink Aircraft
Parameters
(DAPs)
△
Limited to use
△
Limited to use
6
監視技術の動向
Function
Radar
ADS
Main
WAM
Assistant
Present
Future
Year
7
Mode S Radar
・ Surveillance modes
・Elementary Surveillance
- 24-bit address
- Position
- Altitude, …
・Enhanced Surveillance
- Ground Speed
- True Track Angle
- Track Angle Rate, …
Monitor
24-bit Address
Mode S
Transponder
Reply
Controller
Downlink Aircraft
Parameters (DAPs)
Interrogation
Mode S Radar
8
Mode S Radar
・ Elementary Surveillance
- 24-bit address
- Accurate Position
- 25ft resolution Altitude
9
Mode S Radar
・ Enhanced Surveillance
- Ground Speed
- True Track Angle
- Track Angle Rate
- etc..
10
Mode S Radar
・ Experiment System in ENRI
- Update rate 10 seconds
- Coverage radius 250NM (450km)
- Update rate 4 seconds
- Coverage radius 200NM (370km)
SSR in Chofu
SSR in Iwanuma
• DAPs Capability
• Network Coordination Capability
11
高精度追尾システム
・ IMM (Interacting Multiple Model)
xˆ1 (k 1 / k 1), P1 (k 1 / k 1), 1 (k 1)
xˆ2 (k 1/ k 1), P2 (k 1/ k 1), 2 (k 1)
Interacting / mixing
1 (k ), 1 (k 1)
xˆ1o (k 1 / k 1), P1o (k 1 / k 1)
1 ( k )
xˆ2o (k 1 / k 1), P2o (k 1 / k 1)
z (k )
Filter 1
xˆ1 (k / k ), P1 (k / k ), 1 (k )
2 (k ), 2 (k 1)
Filter 2
2 (k )
Mode Probability
Update
xˆ2 (k / k ), P2 (k / k ), 2 (k )
1 (k ), 2 (k )
Combination of estimates
xˆ (k / k ), P (k / k )
12
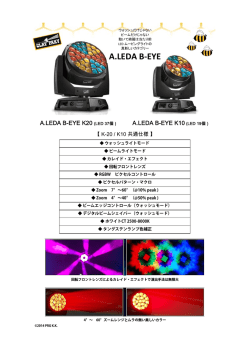
高精度追尾システム
・ IMM Filterの問題
35.9
Measurement
IMM
35.895
Latitude
35.89
35.885
- 初期の時、各モデルの確率に対してデフォルト
35.88
値が設定されている。もし、実際の運動モード
とマッチしない場合は、予測誤差が大きくなる
35.875
可能性がある。
35.87
2
3
4
5
Number of examples
6
7
8
9
13
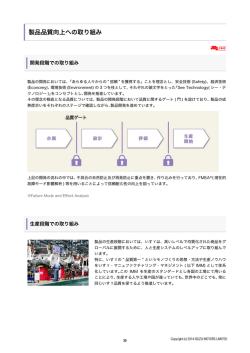
高精度追尾システム
・ IMM Filterの問題
- 後期の時、混合の処理により各モデルの確率
Measurement
IMM
が均一になっている。もし、急に旋回の運動が
35.775
ありましたら、フィルタ検出の遅れにより追従
35.77
性が悪くなる可能性がある。
Latitude
35.765
35.76
35.755
35.75
44
45
46
47
48
Number of examples
49
50
51
14
高精度追尾システム
・ System Architecture
15
高精度追尾システム
・ Detection parameters
C v V gs (k ) V gs (k 1)
等速直線モデル、加速度直線モデル
C a R(k 1) W (k 1)
旋回モデル
・ Initial tracking period
if (Ca 0), then
μ1 (k) = min{μ1 (k - 1), μ 2 (k - 1), μ 3 (k - 1)}
μ 2 (k) = mid{μ1 (k - 1), μ 2 (k - 1), μ 3 (k - 1)}
μ 3 (k) = max{μ1 (k - 1), μ 2 (k - 1), μ 3 (k - 1)}
if (Ca = 0 & C v 0), then
μ1 (k) = mid{μ1 (k - 1), μ 2 (k - 1), μ 3 (k - 1)}
μ 2 (k) = max{μ1 (k - 1), μ 2 (k - 1), μ 3 (k - 1)}
μ 3 (k) = min{μ1 (k - 1), μ 2 (k - 1), μ 3 (k - 1)}
16
高精度追尾システム
・ Later tracking period
if (Ca 0 & μ 3 (k - 1) 0.5), then
μ1 (k) = min{e1 (k - 1), e 2 (k - 1), e3 (k - 1)} - 0.2
μ 2 (k) = mid{e1 (k - 1), e 2 (k - 1), e3 (k - 1)} - 0.1
μ 3 (k) = max{e1 (k - 1), e 2 (k - 1), e3 (k - 1)} 0.3
if (Ca = 0 & C v 0 & μ 2 (k - 1) 0.5), then
μ1 (k) = mid{e1 (k - 1), e 2 (k - 1), e3 (k - 1)} - 0.1
μ 2 (k) = max{e1 (k - 1), e 2 (k - 1), e3 (k - 1)} 0.3
μ 3 (k) = min{e1 (k - 1), e 2 (k - 1), e3 (k - 1)} - 0.2
・ Prediction error rate
ei ( k 1)
i ( k 1)
i ( k 1)
i 1
i ( k 1) | x m ( k ) x p ( k 1) | | y m ( k ) y p ( k 1) |
17
評価実験
・ Comparison
‐ Parameters
Model
Process
noise
Constant velocity
0.01g
Constant acceleration
g
Coordinated Turn
0.1g
‐ Model transition probabilities
0.95 0.025 0.025
P 0.025 0.95 0.025
0.025 0.025 0.95
Measurement
noise
60m
18
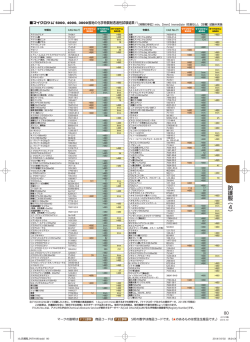
評価実験
・ Trajectory
35.8
End point
Start point
Latitude (deg)
35.75
35.7
35.65
139.8
139.9
140
140.1
140.2
Longitude (deg)
140.3
140.4
140.5
19
評価実験
・ Computer simulations: RMS Position errors
0.25
IMM
Proposal
RMS Prediction Errors in Horizontal (nmi)
0.2
0.15
0.1
0.05
0
0
5
10
15
Sampling time (s)
20
25
30
20
評価実験
・ Practical experiments: RMS Prediction errors
Sampling time
(sec)
Measurement
points
RMS error (nmi)
Proposal
IMM
%Reduction
[0, 100)
62
0.0442
0.1006
56.06
[100, 200)
51
0.0657
0.1022
35.69
[200, 300)
49
0.0433
0.1022
57.63
[300, 400)
37
0.0673
0.1331
49.41
[400, 500)
44
0.0432
0.1111
61.09
[500, 600)
48
0.0427
0.0807
47.16
[600, 700)
64
0.0311
0.05
37.73
[700, 800)
57
0.0317
0.0601
47.33
21
評価実験
・ Practical experiments: RMS Prediction errors
0.35
IMM
Proposal
RMS Prediction Errors in Horizontal (nmi)
0.3
0.25
0.2
0.15
0.1
0.05
0
0
100
200
300
400
Sampling time (s)
500
600
700
800
22
まとめ
1.背景
航空機の増加、新しい監視技術の出現、
DAPsデータの高精度化
2.課題
• Mode Sレーダ監視精度の向上
• 高信頼な追尾システムの構築
3.実験システムの上で、DAPsを用いた高精度追尾
技術を提案した
© Copyright 2026