
実験研究! RCサーボモータの応答特性
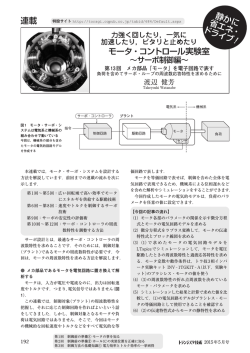
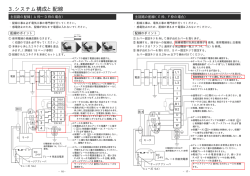
ちょいとメカ制御に便利なお手軽モジュールをマジで使うために 実験研究! RCサーボモータの応答特性 高速化時代! 滝田 好宏 出力軸 RCサーボモータ ギヤ部 4段 2段 軸受 +V ポテンショ メータ +V マイコン, ラジコン 受信器 など 制御基板 目標角 PWM 3段 1段 DC モータ 角度フィード バック マイコン 変換 制御 演算 モータ 駆動回路 図 1 RC サーボモータの基本構造 マイコンにつなぐだけのお手軽モータ入りモジュールが進化している RC サーボモータはラジコンなどの模型用に開発さ れたモータ・モジュールです.模型以外にも角度など をちょこっと制御したいときに簡単に使えます.図 1 に示すように,DC(ブラシ付き)モータ,演算制御用 マイコン,モータ・ドライバ(モータ駆動回路),減 速器(ギア部)などで構成されています.電流制御デ バイスの処理速度が高速化したことで,小型で長寿命 なブラシレス・モータも使われるようになってきました. 2 足歩行ロボットやホバリング・ヘリなどに使う場 合は,特に高速応答が求められ,そのためには,構造 や性能を理解していないといけません.ここでは,市 販 RC サーボモータの構造や特性について実験を交え て紹介します. 使える範囲が広がっている ● 進化 1:制御用マイコンの高速化 マイコンは,高性能化が進んでいます.筆者が RC サーボモータの制御に採用した例を以下に示します. 1994 年に H8/3048(16MHz) 注 1:rotation per minute.1 分間の回転数.r/min とも表記す るが,日本国内のみで通用. 108 2005 年に SH7125(50MHz) 2011年にRX62N(FPU付き,100MHz) RC サーボモータ自体に使うマイコンは,例えば, モータの回転数を 6000rpm 注 1 で制御するとすれば, サンプリング周波数が 100Hz では 1 回転(360° )間隔, 1kHz では 36°間隔,10kHz サンプリングでは 3.6°間隔 で制御量が更新されることになります.マイコンが高 速化すれば高精度の制御が可能になっていきます.な お,時定数が小さい,いわゆる立ち上がりが速いコア レス・モータやブラシレス・モータを使うと,性能の 向上に効果的です. 高速なマイコンを用いることで制御演算に余裕がで き,ホスト側と通信を行って制御パラメータの変更や RC サーボモータ自身の情報の送信を行い,きめ細か な制御をすることが可能になりました.ただし,この ような恩恵を受けるには専用の装置が必要になるの で,システム単価は上がります. ● 進化 2:モータの高性能化 RC サーボモータには,従来はコア付き DC ブラシ 付きモータが採用されていましたが,コアレス DC ブ ラシ付きモータになり,近年はブラシレス・モータへ と高性能化が進んでいます.各社が動作スピードと出 力トルクの大きさを競っています. 主なメーカとしては JR(日本遠隔制御) ,Futaba(双 葉電子工業) ,KO PROPO・KONDO( 近 藤 科 学 ) , SANWA(三和電子機器)が挙げられます. ブラシレス・モータの制御回路は複雑ですが,RC サーボモータ筐体内に組み込めるほど集積技術が向上 し,小型のモータでも回転子の検出が行えるようにな りました. ● 進化 3:減速器の軽量化 一方,減速器は基本的に歯車でできているので,代 わり映えはしません.材質は全て樹脂(ポリアセター ルなど)のもの,一部に金属を使ったもの,すべて金 属のものなどがあります.出力軸にはボール・ベアリ ングが用いられ,それ以外の歯車はすべり軸受けで支 2014 年 7 月号




© Copyright 2026