
リハビリ用医療装置の研究
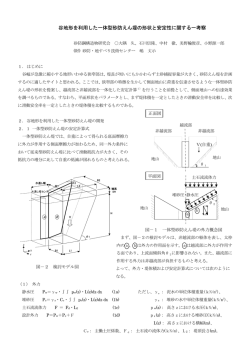
リハビリ用医療装置の研究 機械科学専攻 機械機能設計研究室 M2 池上弘樹 M1 土田博貴 指導教官 立矢宏 教授 樋口理宏 准教授 小塚裕明 助教 1.研究背景・目的 手関節の構造 手関節のリハビリテーション 手先方向への牽引を伴う他動掌背屈運動 手首付近の疾患による拘縮の 早期回復が期待 C-L関節角度 中間 1 2 5 3 4 C-L関節 6 7 R-L関節 背屈 尺骨 作業療法士(OT)によるリハビリ 橈骨 健常者の場合 掌屈運動時:C-L関節 が優位に運動 背屈運動時:R-L関節 2: 小菱形骨 第3中手骨 3: 有頭骨 手首の 屈曲角度 8 掌屈 手根骨 1: 大菱形骨 4: 有鈎骨 3 5: 舟状骨 6 6: 月状骨 R-L関節角度 7: 三角骨 疾患により一方の関節が強く拘縮 橈骨遠位端骨折:R-L関節が拘縮 8: 豆状骨 掌背屈時にはR-L関節とC-L関節が運動 早期回復効果が得られるメカニズムは不明 本リハビリテーションの有用性を確認 R-L関節とC-L関節の運動を解析 2.X線動画像を用いた手根骨運動解析 実験方法 手首牽引 ワイヤ 装置を用いたリハビリ時の手首を X線動画像として撮影 錘の自重 屈曲角度 屈曲角度=R-L関節角度+C-L関節角度 被験者:健常な男性21名 牽引力:0[N],25[N] 錘 手のひら 解析結果 R-L関節角度 寄与率:屈曲角度変化に対する 各関節の角度変化の割合 C-L関節角度 C-L関節 R-L関節 31.40 27.14 牽引によりR-L関節の 寄与率が増加 68.60 72.86 本リハビリはR-L関節の 100 掌屈位 中間位 背屈位 X線動画像撮影用リハビリ装置 手根骨運動解析 角度測定 第3中手骨 ・屈曲角度 屈曲角度 月状骨 橈骨 X線動画像 42.34 53.45 60 40 20 C-L関節角度 有頭骨 寄与率[%] 80 0 57.66 46.55 0[N] 1 掌屈 拘縮改善に有用 25[N] 2 0[N] 1 背屈 25[N] 2 OTによるリハビリの場合 各関節の寄与率 約56[%] ・R-L関節角度 ・C-L関節角度 2次元平面上の解析では手根骨運動の詳細な解明は困難 R-L関節角度 3.MRI画像を用いた手根骨運動解析 3次元CADモデル構築 実験方法 MRI画像撮影用リハビリ装置 回転軸 前腕固定具 高磁場環境下での 実験 手先牽引部 z 橈尺屈方向 装置を用いたリハビリ時の 手首をMRI画像として撮影 掌背屈方向 被験者 :健常な男性 3名 手首牽引 手首の状態:背屈位(40[deg]) 中間位(0[deg]) 掌屈位(-40[deg]) 移動壁 ・ねじの送り量で 送りねじ 手先固定具 圧縮ばね 牽引力を調整 手根骨運動解析 掌背屈角度α 40 オイラー角法による 手根骨運動の解析 3次元での 回転運動を評価可能 ・圧縮ばねによる牽引 3次元手関節モデル MRI画像 角度変化[deg] 手先固定具 (樹脂材料,チタン) y x 牽引力 :0[N],25[N] 非磁性材料 回内外方向 橈尺屈角度β 回内外角度γ 豆状骨 小菱形骨 月状骨 20 0 第3中手骨 -20 有頭骨 有鉤骨 三角骨 舟状骨 大菱形骨 -40 遠位列 近位列 例:手根骨運動解析結果(牽引力0[N] ,背屈運動時) 掌屈位 中間位 背屈位 リハビリ運動時における手根骨の3次元的な運動を解明 4.まとめ・今後の研究計画 今後の研究計画 前腕押え板 まとめ (1) 医療画像撮影環境下において,牽引しながら他動掌背屈運動 が 可能なリハビリテーション装置を製作した. (2) 掌屈および背屈のいずれにおいても,牽引により手首の屈曲角度 に対するR-L関節の運動割合が増加することを 確認した. (3) MRI撮影環境下で使用可能なリハビリテーション装置を製作し, 手関節の3次元運動解析を可能にした. ・ MRI画像を用いた運動画像解析により, リハビリテーション時の手根骨の3次元的な 運動を解明 電動スライダ ・OTと装置とで,非牽引状態における背屈運動 時のR-L関節の寄与率が異なる原因を解明 ・ 臨床応用に向けたリハビリテーション装置 の電動化と臨床実験 前腕固定具 手先固定具 エンコーダ モータ 臨床応用に向けたリハビリテーション装置
© Copyright 2026