
電力システムにおけるエージェントベース電圧制御方式
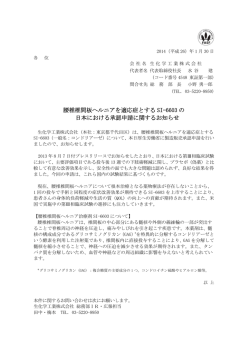
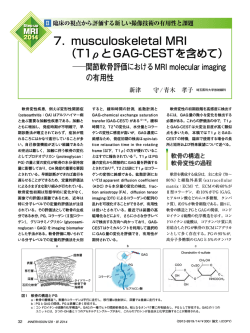
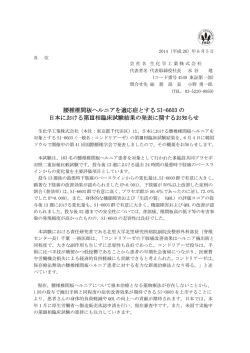
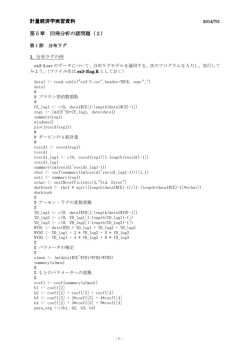
広島工業大学紀要研究編 第4 0巻 ( 2 0 0 6 ) pp.215-220 論 文 電力システムにおけるエージェントベース電圧制御方式 武村 甲斐稔久*・定丸英治日・永田 (平成 17年 8月26日受理) V o l t a g eC o n t r o lbyUsingM u l t i A g e n tApproach T o s h i h i s aKai, E i j iSadamaruandTakeshiNagata ( R e c e i v e dA u g .26,2005) Abstract Int h i spaper ,weproposeanewd e c e n t r a l i z e dm u l t i a g e n tapproachf o rav o l t a g ec o n t r o l usingLRTtransformersands t a t i ccondensers(SCs)/shuntr e a c t o r s(SHR). Theproposed m u l t i a g e n tsystemi sc o n s t r u c t e dwitht w o I e v e lh i e r a r c h i c a la r c h i t e c t u r e .S e v e r a lL o c a lAr ea C o n t r o lAgents(LAGs), whichcorrespondt ot h el o c a lareac o n t r o lsystem,a r el o c a t e da tt h e s u b s t a t i o n s / p o w e r s t a t i o n si nt h el o w e rv o l t a g el e v e la r e a s, w h i l eS e v e r a lG l o b a lAr eaC o n t r o l ot h eg l o b a lareac o n t r o lsystem,a r el o c a t e da tthes u b Agents(GAGs),whichcorrespondt s t a t i o n si nt h ehighv o l t a g el e v e la r e a s . Ino r d e rt odemonstratet h ec a p a b i l i t yo ft h eproposed multi-agentsystem, i thasbeena p p l i e dt oamodelpowersystemnetwork. Thes i m u l a t i o n r e s u l t sshowt h a tt h eproposedm u l t i a g e n tapproachi se f f e c t i v eandp r o m i s i n g . KeyWords:Voltagec o n t r o l,Voltage-Reactivepowerc o n t r o l,Multi-agent, Distributed autonomoussystem ム ( VQC) などが用いられている。しかしながら,従来 1.はじめに の電圧・無効電力制御は,予め決められたスケジュールに 電力システムの電圧は,需要と供給力の変化により,時々 刻々変化する。この電圧が適切に制御されない場合には, 従って制御機器を運転しており,個別機器がローカル情報 のみにより制御されるものが主体になっている。 様々な悪影響が発生する。例えば,昼間の重負荷の時間帯 しかし,急峻な負荷の立ち上りや落ち込みなど厳しい条 では,工場などで遅れ力率の無効電力が大量に消費される 件のもとでは,上手く電圧を健全電圧の範囲内に抑制する ため,需要家までの輸送上の電圧降下が大きく需要家端電 ためには,近隣の電気所との連携を含む特別な配慮が必要 圧が大幅に低下する。逆に,深夜・休祭日の軽負荷の時間 であったり,近隣の制御機器問の相互作用のために無駄な 帯では,ケーブル系統の充電容量や,工場の力率改善用電 動作が発生したりする課題が残されている。 力コンデンサ未開放による進み力率の無効電力のために需 このような問題を解決するための一つのアプローチとし て,自律的なローカル制御を主制御と考え,近隣の制御器 要家端電圧が大幅に上昇する。 このために,電力システム側では電圧・無効電力制御 との協調をとるグローパル制御を補助制御とする方法が考 このような,自律分散的な動作をさせるシステ が実施されている。電圧・無効電力制御には,発電機の えられる AVRや自動力率調整器 ( A P F R ),調相設備や SVC,負荷 ムを比較的柔軟に構築する方法として,マルチエージェン 時タップ切替変圧器 (LRT),電圧・無効電力制御システ ト技術がある キ広島工業大学大学大学院工学研究科情報システム工学専攻 日広島工業大学大学知的情報システム工学科 十 215- O 。 1) 甲斐稔久・定丸英治・永田 投入される。 本論文の目的は,マルチエージェントを用いた自律協調 型電圧制御方式を提案することである。 武 ( 4 ) 静止型無効電力補償装置 (SVC) SVCは,サイリス タ制御により無効電力を高速に変化させ,連続的に系 本システムでは,エージェントを発変電所毎に配置い 統に供給できる装置である それらのエージェントの自律的動作と,必要に応じて他の O 発変電所聞の協調動作により,電圧制御を実現させている。 (2・2) 電圧調整機器 本提案方式の特徴を以下に示す。 (1)本システムは,地域的に分散したコンビュータ内に実 ( L R T ) (1)負荷時タップ切替変圧器 LRTは,ある系 装されたエージェント同士が,ネットワークを介して 統から電圧階級の異なる他系統に対する変圧比を,負 情報交換を行いながら,自律的協調的に電力システム 荷に送電しながら段階的に変化させて電圧を調整する の電圧制御を行うものである。 . 7 5" '2 . 0%きざみの切 変圧器である O 実際には, 0 ( 2 ) 効率的な処理を実現するために,低電圧階級の系統内 '23個設けられている。超高圧変圧 替用タップが 9" 器から配電用変圧器まで広く採用されている。 の発変電所に配置された「ローカルエリアエージェン ト」群と,高電圧階級の変電所に配置された「グロー 以上のように電力システムの電圧制御の方法には様々な パルエリアエージェント」群との 2階層マルチエー 方法が採用されているが,本研究では図 lに示すように, ジェントシステムとして実現している。 ( 3 ) 各エージェントは,複数の内部状態を持ち,外界から の刺激に対して,その内部状態を適切に変化させなが 心 ら外界に対してアクション(負荷時タップ切替変圧器 のタップ切替,および電力用コンデンサと分路リアク L亡 I~ Fscl Z トルを投入・解列)をとるように設計されている。 二 ( 4 )エージェントが自律的に動作するので,人間の操作を 必要としない,自動的な復旧を行うことができる。 J J J 本提案システムを, Java言語を用いて構築し,モデル 系統に適用した結果,エージェント聞の自律的動作により 効率的に電圧制御を実施させることができた。 2 . 電力システムの電圧制御の方法 通常,電力システムの電圧制御は,無効電力調整機器と 図 1 電力システムの電圧制御機器の例 F i g .1 Exampleo fV o l t a g eC o n t r o lEquipmentsi na PowerS y s t e m . 電圧調整機器とに大別される。以下,簡単に無効電力調整 機器と電圧調整機器の概要を説明する。 -S 一a u w -M 一問 一 勾 ι 一町 一白 (1)発電機 -a -問 一 A 一 副 一AU 一口 一 G (2・1)無効電力調整機器 発電機は,励磁電流を制御することにより 無効電力を調整することいができる。ほとんどの発電 機は自動電圧調整器 (AVR)や自動力率調整器 (APFR) を備えており,自動的に励磁電流を制御して発電機の 端子電圧や力率を一定に保っている。 ( 2 ) 同期調相機 同期調栢機は,同期電動機を無負荷運 転させるもので,発電機と同様に励磁電流を制御する ことにより連続的に遅れから進みまでの無効電力を調 整できる O ( 3 ) 電力用コンデンサ (SC) と分路リアクトル (SHR) これらの機器は,無効電力調整源として広く用いられ ている。 SCは,進相の無効電力を吸収するもので, 昼間の重負荷時に投入され 図 2 電圧制御マルチエージェントシステムの基本構成 F i g . 2 B a s i cC o n f i g u r a t i o no fV o l t a g eC o n t r o lM u l t i a g e n t S y s t e m . SHRは,遅相の無効電 力を吸収するもので,深夜などの電圧が高くなる時に 216- 電力システムにおけるエージェントベース電圧制御方式 S C )J と「分 無効電力調整機器として「電力用コンデンサ ( 規定範囲内に収めるように行動するエージェントであ 路リアクトル (SHR)Jを,電圧調整機器として「負荷時タッ るo LAGは独力でその目的を達成できない場合には, プ切替変圧器 (LRT)J を採用している C これらの機器を GAGに対して協調作業を申し入れ,自己の電圧を規 採用した理由は,これらの機器が国内の系統に広く採用さ 定値内に保とうとする。 れていることと,複数のタイプの機器を対象とした自律協 ( 2 ) グローバルエリアエージェント (GAG) 上位電圧 調型電圧制御方式を検討するために十分であると考えられ 階級の変電所に配置される GAGは,変動する電力シ るからである。 ステムの環境変化に対して,電圧監視地点の電圧を規 図 Iにおいて, LRTは負荷時タップ切替変圧器, SCは 定範囲内に納めるように行動するとともに, LAGか 電力用コンデンサ, SHRは分路リアクトル, M の記号は らの協調要請に対応した制御動作が可能か否かを判定 同図に示すように,上 し,制御動作を LAGとメッセージ交換しながら決定 電圧測定用のメータを表している O 位電圧階級と下位電圧階級の 2レベルの電圧階級から構 し,実際の制御動作を実施する。 図 3にエージェントの処理フローを示す。 成される系統モデルを検討の対象とする。 3, 電 圧 制 御 マ ル チ エ ー ジ ェ ン ト シ ス テ ム の 概 要 (3・1)マルチエージ、工ントシステムの構成 ここでは,前章で述べた電力システムの電圧制御をマ ルチエージェントシステムを用いて実現する方法について 説明する。図 2に提案する電圧制御マルチエージェントシ ステムを示す。同図に示すように, 2階層のエージェント で構成し,上層には上位電圧階級エリアの制御を主として G l o b a lArea 担当する「グローパルエリアエージェント ( C o n t r o lAgent:GAG)J 群を,下層には下位電圧階級エ リアの制御を主として担当する「ローカルエリアエージェ L o c a lAreaC o n t r o lAgent:LAG)J 群を配置する。 ント ( 各エージェントの構成は,同図に示すように電圧監視 ( v o l t a g em o n i t o r i n g )J 機 能 知 的 意 思 決 定 ( in t e l l i g e n t d e c i s i o nmaking)J 機 能 , お よ び 「 制 御 動 作 ( c o n t r o l a c t i o n )J機能から構成される。ここで取り扱う制御変数は, ( 1 )P r o c e s s i n gFlowofLoιalAr eaAgent LRTのタップ値(離散量)と SCまたは SHRの投入量(離 散値)である。一般的に,電圧制御は周波数制御と異なり ローカルな制御が実施されるので r 電圧監視」機能で電 圧異常を検出したエージェントは自律的にローカルな制御 を実施する。この際,エージェントは「知的意思決定」機 能により自らの制御方針を決定するが,下層のエージェン トの場合においては,自分の制御変数の上下限等を考慮し, 上層のグローパルエリアエージェントに制御を依頼するこ ① . . . 1 とを決定する場合もある。そして,最後に各エージェント は「制御動作」機能により実際に制御を実施し,ひとつの 動作サイクルが完了する。本システムは,このような動作 の繰り返しにより,リアルタイムでの電圧制御を実現する。 (3・2) 各エージェントの役劃 ここでは,各エージェントについてその概要を説明する。 (l)ローカルエリアエージェント(し生 G) 級の発変電所に配置される LAGは,変動する電力シ ステムの環境変化に対して ( 2 )P r o c e s s i n gFlowofG lobalAreaAgent 下位電圧階 電圧監視地点の電圧を -217- 図 3 エージェントの処理フロー F i g . 3P r o c e s s i n gf l o wc h a r to fa g e nt . 甲斐稔久・定丸英治・永田 武 この式を利用することにより, t=[ 0,200J に対して, 各ノードの負荷を零付近から 1 , 000 [MWJ まで変動させ ることができる。 各監視対象ノードの電圧の許容範囲を表 Iに示す。 表 1 変圧器データ T a b l e1 T r a n s f o r m e rd a t a . #o fTaps V o l t a g erange[ k V ] As / s 23 477""527 Cs / s,D s / s 19 244""300 Es / s 1 9 244""300 Bp / s 1 3 140""168 L o c a t i o n 図 4 モデ、ル系統 F i g .4 M o d e ln e t w o r k . 13 , [ ) ) ) 12 D3 QB 07 国 図 5 負街の変化曲線 1 0 0 2 0 0 ,5) ( 1 ) GAG F i g .5 L o a dc u r v e . 1 は. 13 4 . シミュレーション実験 (4・1)シミュレーション系統 本システムの動作を確認するために,図 4に示すモデ 09 ル系統を使用してシミュレーシヨン実験を行った。シミュ 日8 LA別(P~ レーションシステムは J ava言語で記述した。このモデル -一一一 l l O / > D 阿Wう 四日剛一- U 仰 e r h r r l l t 07 系統は,ローカルエリア内の 4つの発変電所,グローパル 0 エリア内の lつの変電所から構成されている。この系統に 自 一 一 : m ' 0 0 ( 1 ) LAG1 対して,ローカルエリアの発変電所に LAG,グローパル 13 エリアの変電所に GAGをそれぞれ配置した。同図におい 2, 16,が電圧監視地点であり, てノード番号 4,5,8, 1 この電圧を常時監視しており,電圧異常が検出されると当 該エージェントが制御動作を実施する。 図 5に各負荷ノードヘ与えた負荷曲線を構築する際に利 i n( x2)) を示す。同図において横軸の 用した関数 (y s 二 レ 剣G2 ( pL 乃ーー一一 J 凶A DO 酬明 2 . 0,2 . 0 J に対応した値を負荷変化に用いた(図中 領域 [ 川一一 ト隅r h 1 しp p a rli .,,~ー〕 の破線で囲んだ部分)。実際に利用した負荷変動の式を次 式に示す。 ( 2 ) LAG2 図 6 制御結果 (GAG ,L AG) A G ) . F i g . 6 R e s u l t so fc o n t r o l(GAG,L P 500xs i n ( ( 0 . 0 2X t-2.0)2)+500 [MWJ…・・ ( 1 ) 三 218- 電力システムにおけるエージェントベース電圧制御方式 世:0 13 この SCの操作の影響は全系統に亘り,各電圧監視点の出 力に影響を与えていることがわかる。 2 ( 4 '3 ) リアルデータを基にしたシミュレーション 上述のシミュレーションは負荷に対する二次電圧の動き などを見るために現実と違い,負荷の立ち上がりを急にし てシミュレーションを行い,電圧調整範囲にて機器の制御 1 0 0 0 0 0 e rI m a o p p ト e r, l m i t 07 G を働かせた。 次に,変電所の動作を現実に則したものに近づけたシ ( 3 ) LA G3 ミュレーションを行った。使用するモデル系統やインピー ダンスは同様,各エージェントは二次電圧の不感帯を土 1% , として,変圧器無効電力の不感帯を調相設備の単機 容量の 75%とした。エージェントは二次電圧・変圧器無 J 1 J ¥ J J J J J J J J 1 1 i J Jl 効電力が不感帯を逸脱した場合に,その逸脱面積が一定値 を超えた時点の二次電圧と変圧器無効電力によって制御行 動を図 8のように決定する し唱4(PL 乃 O また,負荷は正規分布を採用 した。以下に,その結果を示す。 岨 " ' " c o u p p e r h t M一 一 " 0 ( 2 )LAG4 s c 切] 図 7 制御結果 ( L A G ) F i g . 7 R e s u l t so fc o n t r o l( L A G ) . ¥ ' 2 tap下 げ 不感得 Q s c入 (4・2) シミュレーション結果 上 述 の 負 荷 変 化 に 対 し て 200ス テ ッ プ の シ ミ ュ レ ー ションを行った。図 6は上位電圧階級エリア,図 7は下位 図 8 V-Q制御の概要 F i g . 8 V-QC o n t r o lo v e r v i e w 電圧階級エリアの制御結果を示す。また,同図において, 実線は各エージェントの電圧監視点における電圧の変動 シミュレーションの結果,電圧の調整幅を狭めたことに を,破線は負荷と電圧の許容範囲の上下限を示す。横軸が シミュレーションのステップ数,左の縦軸が電圧 [ P . U , J 右の縦軸が負荷量 [MW] である。 より,エージェント同士の相互作用が良くわかる。周辺の 機器に対する影響の大きいエージェントは GAGと LAGl 図 6に示すように上位系統である GAG (As / s ) は負荷 である o LAGlはシミュレーション初期に不感帯から大き の増大に対して電圧の減少が見られたが,シミュレーショ く上方に逸脱しているため ン中に電圧許容範囲を逸脱することなく終了した。シミュ 作の影響が他のエージェントに影響を与えている o GAG レーションの序盤(19ステップ日)に見られる電圧のわ の作用もタップ操作時に他のエージェントに影響を与えて Es / s ) において ずかな上昇は LAG4 ( s cが投入されたた めである。 機器が動作している O その動 いることカまわ均三る c 5 .あとがき 一方,下位電圧階級エリアの結果を示す図 7において, 8p / s ) は下位系統の中で最も負 発電機を有する LAG1 ( 本論文では,電力システムの電圧制御にマルチエージェ 荷に対する電圧の変動が少なく電圧許容範囲を逸脱しな ントを用いた自律分散協調型電圧制御方式を提案した。本 かった。 LAG2 (Cs / s ) と LAG3 (D s / s ) は,ほぽ同様 システムは,地域的に分散したコンビュータ内に実装され の電圧変化となっている。共に 26ステッブ目から LTR たエージェント同士が,インターネット等を介しで情報交 SCを投入す 換を行しミながら, 自律分散協調的に電圧制御を行うむので るほどの変化ではなかった。電圧変動の最も大きかった ある。簡単なモデ、ル系統で、のシミュレーション実験ではあ LAG4 (Es / s )は , 14ステップ目に LTRの操作が行われ るが,負荷の変動に対して,エージェントが LRTのタッ ているが,この操作だけでは負荷の増大に対応できなかっ プ値と の操作で自動的に電圧の修正が行われたが, たため, 1 9ステッブ目に SCが投入されている。そして, SCの投入量を決定し 監視対象の電圧を規定値以 内に収めることが可能であることがわかった。 -219- 甲斐稔久・定丸英治・永田 武 1ι=二二二二;長三三~~ …- ' " " " " ' ^ ' 同 一 申,.,.一一ー " ' 1 印 ( 1 ) LAG4 ( 1 ) GAG 図 1 0 御結果 ( L A G ) F i g .l O R e s u l to fc o n t r o l( L A G ) . (\_~.~三三='"~~ç-:~ 文 献 1 )T . N a g a t a : “App i I c a t i o n so fM u l t i a g e n tT e c h n o l o g yt o .I EIEJapan,Vo1 . 125,No.3,p p . PowerS y s t e m s ",J inJ a p a n e s e ) 255-258 ( 2 0 0 5 )( '^創刊一一 山由悌崎 U W ' , 一 永田武マルチエージェント技術の電力システムへ n lー 23,3p p . の適用研究事例 j,電気設備学会論文誌, 1 ( 2 ) LAGl 255-258( 2 0 0 5 ) 2) HidenoriAoki,Mzumoto: “ V o l t a g eandR e a c t i v e PowerControlbyP a r t i c l e Swam Optimization .IEEJapan, Considering Control Process",T VoI . l24-B,No.l,p p. 95-102 (2004-12) ( in ;じ:;:j~~:j~三. _ . ' _ . 竺 J a p a n e s e ) 青木秀憲・水谷芳史制御手順を考慮した PSOによ 24, 1 , る電圧無効電力制御 j,電気学会論文誌 B, 1 LI ¥02(Pl J ) - p p .95-102( 2 0 0 4 1 2 ) Lω""'" 晴".,.i m t _.- 3) K ensei Yamamoto,Hidenori Aoki,K e n j iNaoi, Yoshibumi Mizumoto: “Voltage and Reactive ( 3 ) LAG2 Power Control I n t e g r a t i n g Genetic Algorithm andTabuSearchConsideringC o n t r o lP r o c e s s ", T . I EEJapan,Vol . 124-B,No. 12,p p . 1417-1424 ( 2 0 0 4 1 2 )( inJ a p a n e s e ) ~E~~~一午ぺ 山本顕正・直井健二・青木秀憲・水谷芳史制御手 順を考慮した G Aと TSの融合による電圧無効電力制 2,p p . 1417-1424 御 j,電気学会論文誌 B, 124, 1 ( 2 0 0 4 1 2 ) 一 一 '^岬は】一 .Nakayama,e ta1.“A M u l t i A g e n t 4) T .Nagata,H 叩 同 一 一 Approacht oPowerSystemNormalOperation¥ (4) LAG3 T .IEEJapan,Vol . 122-B,No. 10 (2002) ( in J a p a n e s e ) 図 9 制御結果 ( GAG,LAG) F i g . 9R e s u l t so fc o n t r o l(GAG, L A G ) . 永田,中山:I電力系統平常時操作へのマルチエージェ 22, 10( 2 0 0 2 ) ント技術の適用 j,電学論 B, 1 ハり ? ω 旬 つ

© Copyright 2026