
1 ディジタル通信
ディジタル通信
1
前章で紹介した標本化定理によれば,周波数が制限された信号 x(t) に
対して,信号に含まれている最高周波数の二倍以上の周波数で採集した標
本 x(nTs ), n = 0, 1, 2, · · · を Sa(πtfs ) の波形で補間を行えば,歪みなく信
号 x(t) を復元できる.従って,送信側では連続信号 x(t) をすべて送信す
る必要がなく,その代わりに x(nTs ) の情報を送信すれば,受信側では受
け取った情報に基づいて連続信号 x(t) を復元できる.
連続信号 x(t) に対して,サンプリングした信号 x(nTs ) は,実数の値を
取るので,ディジタル方式で送信することができない.その理由は,一般
的にサンプリングされた信号は x(nTs ) ∈ R となり,R が非可算集合1 に
なっていることにあるので,x(nTs ) を可算集合 X の内にある要素 xn ∈ X
に変換する必要がある.ここで,xn の確率分布によっては X は必ずしも
有限の要素を持つ必要がないが,ここでは信号空間が |X | < ∞ となる有
限集合と仮定する.
標本化された信号 x(nTs ) から有限集合内の xn への変換する方法が量子
化である.量子化の方法では,量子化関数 Q(x) を用いて,xn ≈ Q(x(nTs )),
xn ∈ X , の信号に変換するので,量子化雑音
qn = x(nTs ) − xn
(1)
が生じる.そのために,量子化雑音のエネルギーの期待値が最小になるよ
うに最適化を行う必要があり,x(nTs ) の実数空間での確立分布を PX (x)
とおくと
∫ ∞
2
σ :=
[x − Q(x)]2 PX (x)dx
(2)
−∞
が最小になるような量子化関数
ˆ
Q(x)
:= arg min σ 2
(3)
Q(x)
を探す必要があるが,この最適化は PX (x) が求められることが前提となる.
量子化によって x(nTs ) を有限集合 X 内の要素 xn に変換したので,効率
は必ずしもいいとは言えないが,xn はディジタル方式で送信可能である.
1
例 1 周波数 1 の余弦波 x(t) = cos 2πt を Ts = 16
間隔でサンプリングし
て生成した数列
)
(
π
3π
15π
π
cos
cos
· · · cos
1 cos
8
4
8
8
1
非加算集合は無限の無限倍の要素を持つ.
36
は無理数を含むので,このままではディジタル通信方式では送信すること
ができない.
そこで,x(t) の出力区間 [−1 1] に対して,次の関数
QM (x) := round(x × M )/M
(4)
を用いて量子化を行うことにするが,この関数は x の M 倍の数値に対し
て小数点以下を四捨五入した後の数値をもとのスケールに戻すものであ
り,M = 2, 10 の場合の出力は
(
(
2
2
10
10
2
2
9
10
1
2
7
10
1
2
4
10
0
2
0
10
− 12
4
− 10
− 21
7
− 10
− 22
9
− 10
− 22
− 10
10
− 22
9
− 10
− 21
7
− 10
− 12
4
− 10
0
2
0
10
となる.
つまり,M = 2 の場合は,サイズ 5 の有限集合
{
}
1 2
X2 = 0, ± , ±
2 2
の中の一つの要素を送信すればいいので,送受信側で M = 2 と約束し,
実際には分子に M を加算した非負の整数列
d = (4 4 3 3 2 1 1 0 0 0 1 1 2 3 3 4)
(5)
を送信すれば,受信側では受け取った信号ベクトル d(理想の通信路を仮
定) の n 番目の値 dn から
dn
xn =
−1
(6)
M
の計算を行うことで,量子化後の値 xn を復元できる.
M = 10 の場合にも同じく非負の整数列
d = (20 19 17 14 10 6 3 1 0 1 3 6 10 14 17 19)
から式 ( 6) を用いて,xn を復元できるが,この場合有限集合
{
}
4
7
9
10
X10 = 0, ± , ± , ± , ±
10 10 10 10
はサイズ 9 の集合になるので,通信の難度は高まる.
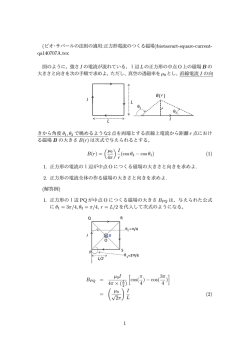
一方,受信側では xn までしか復元できないので,量子化誤差は回避で
きない.上の例での xn とサンプリング信号を比較してみると,図 1 で示
しているように M が多くなるに従って,xn と x(nTs ) の誤差が小さくな
くなる.このような量子化の分解度を高めると,量子化誤差は小さくなる
が,通信の難度が高まる現象ははどんな量子化関数を用いても共通のもの
である.
37
1
2
4
10
1
2
7
10
2
2)
9
10 )
1
x(nTs)
M=2
M=10
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
5
10
15
図 1: 量子化の結果比較
量子化は連続時間のサンプリング値 x(nTs ) から有限集合 X を生成でき
るが,有限集合 X を生成するに必ずしも量子化を用いる必要はない.
例えば,例 1 の場合に cos nπ
8 ,n ∈ Z は有限集合
{
}
π
π
3π
3π
π
π
X = −1, − cos , − cos , − cos , 0, cos , cos , cos , 1
8
4
8
8
4
8
から値を取るので,送受信側で集合 X を共有し,実際には
d = (8 7 6 5 4 3 2 1 0 1 2 3 4 5 6 7)
を送信すれば,受信側ではサンプリングの値を歪みなく復元することがで
きる.
いずれにしても,ディジタル通信では,いかなるものであっても M 個
の要素からなる有限集合 M = {0, 1, · · · , M − 1} から整数を送信する問題
に転換できるが,M 内の各整数は二進数展開し,長さが K = dlog2 M e
となるビット列 (b0 b1 · · · bK−1 ) で表現する場合が多い.
1.1
ディジタル変調方式
ディジタルデータを遠方に伝送する場合,データの情報を伝送に適して
いる高い周波数の正弦波を用いて通信効率を上げている.そのために,正
弦波
A cos(2πfc t + φ)
の中で利用する変数に対応して,M = 2 で単独の変数を利用する場合は
38
1. 振幅シフトキーイング変調 (ASK)
データに基づいて振幅 A を変化させる
2. 周波数シフトキーイング変調 (FSK)
データに基づいて周波数 fc を変化させる
3. 位相シフトキーイング変調 (PSK)
データに基づいて位相 φ を変化させる
の変調方式がよく用いられ,M > 2 の場合には,それぞれ MASK(M -ray
ASK), MFSK, MPSK と呼ばれる.
また,二つの変数を組合わせる場合には
• 直交振幅変調 (QAM)
データに基づいて振幅 A と位相 φ を変化させる
が一般的である.
1.1.1
MASK 変調
MASK 変調では,入力される信号 dn から
sn (t) =
A
dn cos 2πfc t, 0 ≤ t < T
M −1
(7)
を生成して送信するが,ここで各パラメータは
• A:最大振幅
• M :入力データの最大値
• fc :搬送波の周波数
• T :一つのデータを送信する時間幅
となる.
例えば,データ
d = (0 1 2 3)
(8)
が入力された場合,ASK 変調後の波形は図.2 のようになる.
MASK 信号の検波には,非同期検波と同期検波の二種類がある.非同
期検波では,入力された信号を帯域フィルタに通した後,図.3 の包絡線検
波回路を用いて包絡線を抽出し,復調することができる.非同期検波器
39
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
0.5
1
1.5
2
2.5
3
3.5
4
図 2: MASK 信号の波形
vIn (t)
vOut (t)
図 3: MASK 信号の非同期包絡線検波回路
は,検波器で搬送波の周波数を正確に知らなくても復調することができる
が,同期検波器より検波の性能が劣る.
一方,搬送波の高い精度で周波数の周波数と位相が検知できる場合に
は,図.4 の同期検波を用いて,検波性能を高めることができる.
同期検波でも受信された信号を帯域フィルタに通して,雑音の影響を抑
えるところは非同期検波器と同様であるが,その後はその出力された信
号と搬送波の正弦波 cos 2πfc t の積信号を生成する.雑音を無視した場合,
sn (t) との積信号は
A
dn cos2 2πfc t
M
A
= dn
(1 + cos 4πfc t)
2M
sn (t) cos 2πfc t =
(9)
A
となるので,低域フィルタを使って倍数波成分を取り除くと振幅が dn 2M
の直流を得ることができる.
40
⊗
cos 2πfc t
図 4: MASK 信号の同期検波
1.1.2
MFSK 変調
MFSK 変調を用いた場合の変調信号は
sn (t) = A cos 2π(fc + ∆dn )t, 0 ≤ t < T
(10)
となるが,ここで ∆ は隣接周波数の間隔であり,(8) の対応波形は次の図.
5 のようになる.
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
0.5
1
1.5
2
2.5
3
3.5
4
図 5: MFSK 信号の波形
MFSK 変調の検波も MASK 信号の検波と同じく,非同期と同期検波が
存在するが,いずれも MASK 信号の検波素子を並列に並べて構成するこ
とができる.図.6 は MFSK 信号の同期検波のブロック図であるが,こ
こでは受信された信号を中心周波数が fc , fc + ∆,· · · ,fc + (M − 1)∆ とな
る図.4 で示した同期検波に同時に入力する.最大値判定器では,M 個の
同期検波器から出力が最大となるものを探すことで MFSK 変調信号の周
波数を判定する.
41
fc
(非)同期検波
fc + ∆
MFSK信号
最大値
(非)同期検波
判 別
..
.
fc + (M − 1)∆
(非)同期検波
図 6: MFSK 信号の検波
1.1.3
MPSK 変調
MPSK 変調では位相にデータの情報を埋め込み,信号
sn (t) = A cos [2π(fc t + dn /M )] , 0 ≤ t < T
(11)
を生成するので,信号配置図は図.7 となり,(8) 波形は次の図.8 となる.
···
2π
2π
M
1
M
0
2π
M −1
M
···
図 7: MPSK の信号配置図
MPSK 変調は位相を使用しているため,非同期検波ができない.図.
9 は MPSK 信号の同期検波器を示しているが,ここでは,帯域フィルタ
を通した信号に対して,同じ周波数で直交する二つの正弦波 cos 2πfc t と
sin 2πfc t を用いて乗積を行うので,出力はそれぞれ
yI (t) = A cos [2π(fc t + dn /M )] cos 2πfc t
42
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
0.5
1
1.5
2
2.5
3
3.5
4
図 8: MPSK 信号の波形
{
}
2πdn
A
cos
+ cos [2π(2fc t + dn /M )]
=
2
M
yQ (t) = A cos
{ [2π(fc t + dn /M )] sin 2πfc t
}
A
2πdn
=
− sin
+ sin [2π(2fc t + dn /M )]
2
M
(12)
となる.yI と yQ の信号を低域フィルタに通すと,二次周波数成分はカッ
トされ,それぞれ
A
2πdn
cos
2
M
A
2πdn
= − sin
2
M
zI =
zQ
が出力される.従って,
M
dn = − tan−1
2π
(
zQ
zI
)
(13)
を計算することで,MPSK 信号の位相が判定できる.
1.1.4
QAM 変調
上で紹介した MASK では周波数が fc となる正弦波(或は余弦波)の振
幅に情報を載せるが,周波数が fc となる波形には,cos 2πfc t と sin 2πfc t
の直交する二つの成分が存在する.そのために,余弦波と正弦波の振幅に
43
⊗
cos
成分判定
信号
位相判定
MPSK
cos 2πfc t
⊗
sin
成分判定
sin 2πfc t
図 9: MPSK 信号の検波
それぞれ dnI , dnQ ∈ M の二つの整数を同時に送信することができるが,
このような変調方式が QAM 変調となる.
A
= 1 とすると,QAM 変調方式では (dnI , dnQ )
簡単のために,(7) で M
の整数組に応じて
{
snI (t) = dnI cos 2πfc t
snQ (t) = dnQ sin 2πfc t
を生成し,時間区間 0 ≤ t < T でその加算信号
sn (t) = snI (t) + snQ (t)
= dnI cos 2πfc t + dnQ sin 2πfc t
(14)
を送信する.
QAM 信号は図.9 で示している MPSK 信号の検波器で復調することが
できるが,この場合 (12) はそれぞれ
yI (t) =
yQ (t) =
dnI
2
dnQ
2
となり,これらの出力から送信された (dnI , dnQ ) を判定できる.
式 (14) での二つの波形は互いに直交するので,M = {−3, −1, 1, 3} の
場合,図.10 のような信号配置図に対応できる.ここでは,M = |M| = 4
より,|M2 | = 16 の信号点が存在するので,0 から 15 までの整数を各信
号点に対応させることで情報を送信できる.
式 (14) では,余弦波と正弦波の成分を別々に表記しているので,変調方
法の表現には便利であるが,実際に送信される波形を考えるために,Part1
44
Q
I
−3
0
−1
1
3
図 10: QAM の信号配置
資料での式 (5) と同様に
cn
√
d2nI + d2nQ
(d )
n
= − tan−1 dnQ
=
φn
(15)
I
とおくと,式 (14) は
sn (t) = cn cos (2πfc t + φn )
(16)
と書ける.つまり,実際に送信される波形は (dnI , dnQ ) によって振幅と位
相が変化する一つの正弦波となる.
式 (16) の信号形式の表現に便利なのが信号の複素数表現である.送信
するデータ組に対して複素数表現
dn = dnI + jdnQ
(17)
xn (t) = dn e−j2πfc t
(18)
を使用し,
とすると
sn (t) = <{xn (t)}
より,送信される信号は式 (18) の実部となるほか,式 (15) を用いて送信
は計の位相も (17) から簡単に計算できる.
45
QAM 変調は一つの周波数を用いて,時間 T の間に M 内の二つの整
数 nI , nQ を送ることができるので,周波数の利用効率が高くデジタル回
線での主流の変調方式となっている.現在は信号処理技術の発展により,
1024QAM なども実用化されているが,未だシャノンが示した周波数利用
効率の限界に到達できる一般的な方法は見つかっていない.シャノンが示
した周波数利用効率の限界を達成する上で
• 信号配置点の最適化
• ビットラベリングの最適化
• 適切な誤り訂正符号の適応
などが特に重要と思われているが,これらの問題は互いに影響するほか,
通信システムの構造や情報が伝達する通信路などとも複雑に関連するの
で,一般的な議論の展開はとても困難である.
1.2
ビットラベリング
後述する誤り訂正符号は二進数のビット単位での誤り訂正符号を主に扱
うので,シンボルからビットへの変換例として,図.11 で示した一次元
の 8PSK 変調のマッピング2 について考える.
2
3 (011)
(010)
(011)
(010)
4 (100)
1
(000)
(110)
(111)
5 (101)
(001)
(001)
0 (000)
(100)
(101)
7 (111)
6 (110)
図 11: 8PSK の信号の Gray ラベリング
ラベリングは M 内の整数を一意な二進数に変換すればよいので,各要
素に対して二進数展開をすることで図.11 の円の外側で示した自然ラベ
リングが得られる.
2
Gray ラベリングは信号が熱雑音のみに影響される通信路では最適となる場合がある.
46
一方,送信された信号が雑音の影響を受けると,送信された信号点は受
信側で他の信号と判定されることがあるが,通常隣合う信号点に判定され
ることが多い.その故に,隣り合う信号はことなるビット数が少ないこと
が望まれる.しかし,自然ラベリングルールに従うと,0 が 7 に間違えた
場合,すべてのビットが異なり,3 ビットのエラーを引き起こす.
自然ラベリングの改善策として考案されたのが Gray ラベリングである
が,隣合うラベリングは 1 ビットのみ異なるのが特徴であり,次のように
して校正できる.
1. L = {(0), (1)}
2. L 内の要素の先頭に 0 を付けた集合 L0 = {(00), (01)} を生成する.
3. L 内の要素の順番を逆にし,先頭に 1 を付けた集合 L1 = {(11), (10)}
を生成する.
4. L = L0 ∪ L1 とし,必要に応じて 2~4 を繰り返す.
47
2
確率過程
今まで扱った信号は,時間 t に対して確定的な関数となる確定過程の信
号である.一方,送信信号がない場合,受信機の出力は雑音の影響のみを
受けることになるが,N 台の受信機の仕様がすべて同じであっても,出
力される波形は受信機毎に,測定する度にすべて異なり,時間の確定的な
関数で表すことができない.しかし,時刻 t を固定した場合,このような
信号は出力する値とその値が出現する確率 (もしくは確率分布) を用いて
表現することができ,確率過程として扱う.
2.1
確率過程の数学特徴
ξ(t) が確率過程である場合,時刻 t を固定した時の値 ξ(t0 ) は確率変数
とる.ξ(t0 ) に対して,十分に大きな N 個の標本を取り,n 回目の標本値
を xn (t0 ) と記すると,その平均
N −1
1 ∑
xn (t0 )
N →∞ N
µξ (t0 ) = lim
(19)
n=0
を集合平均もしくは期待値と呼ぶ.またこのような統計量が時刻 t0 の値
と無関係なプロセスを定常過程と呼ぶ.
時刻 t0 での確率密度関数 fξ (x; t0 ) が与えられた場合,ξ(t) のでの期待
値は
∫ ∞
xfξ (x; t0 )dx
(20)
µξ (t0 ) = E{ξ(t0 )} =
−∞
で表すことができ,平均値のまわりの二次モーメント
σξ2 (t0 ) = D{ξ(t0 )}
= ∫
E{[ξ(t0 )]2 } − [E{ξ(t0 )}]2
∞
=
[x − µξ (t0 )]2 fξ (x; t0 )dx
(21)
−∞
を分散と呼ぶ.期待値と分散は,時刻を固定した場合の集合に対する統計
量である.
ξ(t) の任意の標本 xn (t) について,十分に大きな時間 T での時間平均
1
x
¯n = lim
T →∞ T
∫
T
xn (t)dt
(22)
t=0
と集合平均 x
¯(t) が一致するプロセスエルゴード過程である.一般的に時
間平均は集合平均より求めやすいので,実用上最も重要なプロセスであ
48
り,この講義で扱う確率過程はエルゴード過程に限る.エルゴード過程は
すべて定常過程であるが,定常過程は必ずしもエルゴード性を持たない.
エルゴード過程を十分に長い時間 T を観測した場合,ξ(t) が x より小
さくなる時間切片 τi (x) の総和と T の比率
N −1
1 ∑
Pξ (x) = lim
τi (x)
T →∞ T
(23)
t=0
が確率分布関数となり,確率密度関数を
fξ (x) =
dPξ (x)
dx
(24)
で求められる.
確率過程 ξ(t) の時刻 t0 と t1 での関係を表すために,2 変数確率密度関
数 fξ (x0 , x1 ; t0 , t1 ) を用いて自己相関関数
Rξ (t0 , t1 ) = E{ξ(t
1 )}
∫ ∞ ∫0 )ξ(t
∞
=
x0 x1 fξ (x0 , x1 ; t0 , t1 )dx0 dx1
−∞
(25)
−∞
を定義し,平均値 µξ (t0 ),µξ (t1 ) のまわりの一次モーメント
Cξ (t0 , t1 )
= E{[ξ(t
∫
∫ 0 ) − E{ξ(t0 )}][ξ(t1 ) − E{ξ(t1 )}]}
∞
∞
−∞
−∞
=
[x0 − µξ (t0 )][x1 − µξ (t1 )]fξ (x0 , x1 ; t0 , t1 )dx0 dx1 (26)
を共分散と呼ぶが,t0 = t1 の場合
σξ2 (t0 ) = Cξ (t0 , t0 ) = Rξ (t0 , t0 ) − [µξ (t0 )]2
(27)
が成り立つので,確率過程の共分散は自己相関関数と期待値より導ける.
2.2
自己相関関数と電力スペクトル密度
ξ(t) が定常エルゴード過程である場合,ξ(t) の集合平均は時刻 t の値に
よらない.その故に,式 (25) で t0 = 0 とし,t1 = t0 + τ とすることで自
己相関関数を
Rξ (τ ) = E{ξ(t)ξ(t
∫ ∞ ∫ ∞ + τ )}
=
x0 x1 fξ (x0 , x1 ; 0, τ )dx0 dx1
−∞
−∞
49
(28)
のように,時間差 τ のみの関数に表せる.また,エルゴード性での集合平
均と時間平均が一致する特性を利用すると自己相関関数は更に
Rξ (τ ) =
1
T →∞ T
∫
lim
T
2
x(t)x(t + τ )dt
(29)
− T2
と簡略化できる.
定常過程 ξ(t) の自己相関関数 Rξ (τ ) のフーリエ変換
∫ ∞
Sξ (f ) =
Rξ (τ )e−j2πf τ dτ
(30)
を電力スペクトルまたはスペクトル密度と呼び,双対性より
∫ ∞
Rξ (τ ) =
Sξ (f )ej2πf τ df
(31)
−∞
−∞
が成り立つ.
伝送路において代表的な白色雑音は,スペクトル密度がすべての周波数
において一定値
Sξ (f ) =
N0
2
(32)
となるが,白色雑音になる必要十分条件は自己相関関数が
Rξ (τ ) =
N0
δ(τ )
2
(33)
となることである.
受信機では雑音の影響を抑えるために,図.4,6,9 で示したように受
信信号を搬送波の周波数を中心とする帯域フィルタに通す前処理を行う.
この場合,フィルタの帯域幅を B とすると,雑音の電力スペクトルは狭
帯域
{
N0
B
2 ; |f − fc | ≤ 2
(34)
Sξ (f ) =
0;
otherwise
となるので,式 (31) より自己相関関数は
[∫
]
∫ fc +B/2
−fc +B/2
N0
j2πf τ
j2πf τ
Rξ (τ ) =
e
df +
e
df
2
−fc −B/2
fc −B/2
= N0 BSa(πBτ ) cos 2πfc τ
となる.
50
(35)
2.3
正弦波確率過程
正弦波過程
ξ(t) = A cos(ωt + φ)
において ω は常数とし,以下の二つの状況を考える
1. φ = 0 とし,V は (0, 1) 内の一様分布
{
1; 0 ≤ v ≤ 1
fV (v) =
0; otherwise
(36)
に従う確率変数であるとする.
確率変数 V の標本 V =
2
3
を固定した場合,出力は
x(t) =
2
cos ωt
3
の確定過程となる.
一方,時刻 t = 0 にした場合,ξ(0) = V より,出力は密度分布が式
(36) で与えられる確率変数となる.
また時刻が t =
π
4ω
の場合には
ξ
(π )
V
=√
4ω
2
となるので,分布が
( π )
fξ v;
=
4ω
{ √
√
2; 0 ≤ v ≤ 1/ 2
0;
otherwise
(37)
この場合,確率の分布が時間に依存するので,定常過程ではない.
2. A = 1 とし,φ ∈ [−π π] の一様分布
{
1
2π ; −π ≤ φ ≤ π
fΦ (φ) =
0;
otherwise
(38)
に従う確率変数とする.
時刻 t0 においての ξ(t0 ) と φ の関係は
ξ(t0 ) = cos(ωt0 + φ), − π ≤ φ ≤ π
51
(39)
となるので
φ = cos−1 ξ(t0 ) − ωt0 , − 1 ≤ ξ(t0 ) ≤ 1
(40)
となる.
その故に変換のヤコビアンは
J=
dφ
−1
=√
dξ(t0 )
1 − ξ 2 (t0 )
となるので ξ(t0 ) の確率密度関数は
fξ (x; t0 ) = 2|J|f
{ Φ (φ)
=
√1
;
π 1−x2
−1 ≤ x ≤ 1
0;
otherwise
式 (41) は t0 の値に依存しないので,定常過程である.
52
(41)


© Copyright 2026