
クリーンロボット カタログ 仕様ページ(5.1MB)
LCM100 リニアコンベアモジュール TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット PHASER リニア単軸ロボット XY-X 直交ロボット YK-XG スカラロボット YP-X ピック&プレイス CLEAN クリーン TYPE アプリケーション CLEAN APPLICATION クリーンロボット CONTENTS ■ クリーンロボット 仕様一覧表···398 単軸 ● TRANSERVO SSC04 ············································· 401 SSC05 ············································· 402 C4L ·················································· 404 C4LH················································ 405 C5L ·················································· 406 C6L ·················································· 408 C8 ···················································· 409 C8L ·················································· 410 YK220XC ········································· 425 YK250XGC ······································ 426 YK350XGC ······································ 428 YK400XGC ······································ 430 YK500XGLC ···································· 432 YK500XC ········································· 434 YK600XGLC ···································· 435 YK600XC ········································· 437 YK700XC ········································· 438 YK800XC ········································· 439 YK1000XC ······································· 440 単軸 C8LH················································ 411 YK180XC ········································· 424 C10 ·················································· 412 直交 C14 ·················································· 413 C14H················································ 414 C17 ·················································· 415 スカラ C17L ················································ 416 C20 ·················································· 417 直交 XY-XC ● 2軸 SXYxC ············································· 418 ● 3軸/ZSC SXYxC ············································· 420 主な特長 ▶ P.44 397 各種情報 C5LH················································ 407 スカラ YK-XC コントローラ ● FLIP-XC SXYxC ············································· 422 CONTROLLER INFORMATION SSC05H ··········································· 403 ● 4軸/ZRSC APPLICATION アプリケーション LCM100 リニアコンベアモジュール TRANSERVO 小型単軸ロボット クリーンロボット 仕様一覧表 クリーン単軸ロボット ● TRANSERVO ・クリーン度 CLASS10 ・吸引量 15 ∼ 80Nℓ/min モデル名 SSC04 FLIP-X 単軸ロボット SSC05 PHASER リニア単軸ロボット XY-X 直交ロボット SSC05H リード (mm) 可搬質量 (kg) 水平 垂直 ストローク(mm)と最高速度(mm/sec) 50 100 150 200 250 12 2 1 600 6 4 2 300 2 6 4 100 300 350 400 450 500 550 掲載ページ 600 650 700 750 800 P.401 20 4 – 1000 933 833 733 633 12 6 1 600 560 500 440 380 6 10 2 300 280 250 220 190 20 6 – 1000 933 833 733 633 8 – 600 560 500 440 380 440 380 280 250 220 190 220 190 12 6 – 2 500 12 – 300 – 4 250 P.402 P.403 ● FLIP-XC YK-XG スカラロボット ・クリーン度 CLASS10 ・吸引量 20 ∼ 90Nℓ/min モデル名 YP-X ピック&プレイス C4L/C4LH C5L/C5LH クリーン CLEAN C6L C8 コントローラ C8LH 各種情報 CONTROLLER INFORMATION C8L C10 C14 可搬質量 繰り返し モータ出力 リード (kg) 位置決め精度 (W) (mm) (mm) 水平 垂直 30 30 60 100 100 100 100 100 ±0.02 ±0.02 ±0.02 ±0.02 ±0.01 ±0.01 ±0.01 ±0.01 単軸 C14H ±0.01 直交 C17 400 ±0.01 C17L 600 ±0.02 スカラ C20 398 200 600 ±0.01 ストローク(mm)と最高速度(mm/sec) 50 100 150 200 250 300 350 400 450 12 4 .5 1 .2 720 6 6 2.4 360 2 6 7.2 120 20 3 – 1000 12 5 1.2 800 6 9 2.4 400 20 10 – 1000 800 500 550 600 650 700 750 800 850 900 950 600 12 12 4 6 30 8 20 12 – 900 800 700 650 12 20 4 720 648 540 468 432 360 6 40 8 360 324 270 234 216 180 20 20 4 900 800 700 650 10 40 8 600 510 450 390 360 330 300 5 50 16 300 255 225 195 180 165 150 400 1000 1000 20 30 – 900 800 700 650 600 550 10 60 – 600 1000 510 450 390 360 330 300 270 5 80 – 300 255 225 195 180 165 150 20 20 4 1000 950 750 600 10 40 10 500 475 375 300 5 60 20 250 237 187 150 20 30 4 1000 950 750 600 10 55 10 500 475 375 300 150 135 5 80 20 250 237 187 20 40 8 1000 950 750 600 10 80 20 500 475 375 300 250 237 187 150 5 100 30 20 80 15 1000 800 10 120 35 500 400 50 50 10 20 120 25 1000 800 10 – 45 500 400 LCM100 TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット PHASER リニア単軸ロボット XY-X 直交ロボット YK-XG スカラロボット YP-X ピック&プレイス CLEAN クリーン P.408 リニアコンベアモジュール C5L: P.406 C5LH:P.407 アプリケーション C4L: P.404 C4LH:P.405 APPLICATION 掲載ページ 1000 1050 1100 1150 1200 1250 1300 1350 1400 1450 1500 1550 1600 1650 1700 1750 1800 1850 1900 1950 2000 2050 P.409 500 450 240 210 120 105 600 500 300 250 150 125 600 500 300 250 150 125 600 500 300 250 150 125 P.410 P.411 P.412 P.413 単軸 120 P.414 700 600 400 350 300 1000 500 P.415 250 1000 700 600 500 400 350 300 250 1000 1000 1000 1000 900 800 800 P.416 P.417 スカラ 800 1000 直交 800 399 各種情報 240 135 コントローラ 500 270 CONTROLLER INFORMATION 550 APPLICATION アプリケーション LCM100 リニアコンベアモジュール TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット PHASER リニア単軸ロボット クリーンロボット 仕様一覧表 クリーン直交ロボット ● XY-XC アームバリエーション ・クリーン度 CLASS10 ・吸引量 60 ∼ 90Nℓ/min ・ステンレスシート採用により開口部を最小に設計 ・クリーンロボット専用ケーブルダクト採用 クリーンルーム専用 上向きに設置された Y軸のスライダが動作するタイプ ※ユーザ配線:D-Sub 25Pinコネクタ :24 芯、0.3sq (1∼24 番結線済・25 番フレームグランド) ※ユーザ配管:φ6エアーチューブ3本 タイプ 2軸 モデル名 SXYXC XY-X 直交ロボット SXYXC(ZSC12) 3軸 SXYXC(ZSC6) YK-XG スカラロボット SXYXC(ZRSC12) 4軸 YP-X ピック&プレイス SXYXC(ZRSC6) T1 最高速度(mm/sec) 最大可搬質量(kg) 軸 動作範囲 X 150 ∼ 1050mm 1000 Y 150 ∼ 650mm 1000 X 150 ∼ 1050mm 1000 Y 150 ∼ 650mm 1000 Z 150mm 1000 X 150 ∼ 1050mm 1000 Y 150 ∼ 650mm 1000 Z 150mm 500 X 150 ∼ 1050mm 1000 Y 150 ∼ 650mm 1000 Z 150mm 1000 R 360° 1020° /sec X 150 ∼ 1050mm 1000 Y 150 ∼ 650mm 1000 Z 150mm 500 R 360° 1020° /sec 掲載ページ P.418 20 M 3 P.420 5 P.420 3 P.422 M T3 M M P.422 5 クリーン CLEAN クリーンスカラロボット ● YK-XC/YK-XGC/YK-XGLC ・クリーン度 YK-XC ........................... CLASS 10 ・ジャバラを先端軸に装備 ※ CLASS 10(0.1μm)FED-STD-209D相当 コントローラ ・吸引量 30 ∼ 60Nℓ/min ・ハーネス完全内蔵 2000 万往復の耐久試験をクリア 各種情報 CONTROLLER INFORMATION YK-XGC/YK-XGLC ....... CLASS ISO3(ISO14644-1)※ タイプ アーム長(mm)とXY軸合成最高速度(m/s) モデル名 120 超小型 YK180XC YK220XC 単軸 YK250XGC 小型 YK350XGC YK400XGC 直交 中型 180 220 250 300 350 400 3.3m/s 3.4m/s 4.5mm/sec 5.6mm/sec 6.1mm/sec 500 600 700 800 900 1000 1200 スカラ 最大 可搬質量 (kg) R軸許容慣性 モーメント (kgm2) 掲載ページ 0.42 1 0.01 0.45 1 0.01 0.57 4 0.05 0.57 4 0.05 0.57 4 0.05 P.424 P.425 P.426 P.428 P.430 P.432 P.434 P.435 P.437 P.438 P.439 P.440 YK500XGLC 5.1mm/sec 0.74 4 0.05 YK500XC 4.9m/s 0.53 10 0.12 YK600XGLC 4.9mm/sec 0.74 4 0.05 YK600XC 5.6m/s 0.56 10 0.12 0.57 20 0.32 0.57 20 0.32 0.60 20 0.32 YK700XC YK800XC YK1000XC 400 150 標準 サイクル タイム (sec) 6.7m/s 7.3m/s 8.0m/s 776 611 656 516 507 829 789 12 6 リード 204 93 102 62 43 48 29 リード 292 152 169 112 84 92 60 垂直使用時 リード 218 107 116 76 56 61 40 リード リード C (単位:mm) B C リード リード B 壁面取付使用時 A 1kg 274 2kg 133 12 2kg 149 3kg 92 6 4kg 63 4kg 72 6kg 39 2 C A 2 0.5kg 1kg 1kg 2kg 2kg 4kg MR MP (単位:mm) A C 407 204 223 107 118 53 408 204 223 107 118 53 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です(寿命計算時のストロー クは400mm)。 (単位:N・m) MY 16 MP 19 MR 17 ■ 適用コントローラ コントローラ TS-S2 TS-SH TS-SD 運転方法 ポイントトレース/ リモートコマンド パルス列 ※1. 片振りでの繰り返し位置決め精度。 ※2. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 SSC04 約200(ケーブル長さ) 161±2:モータ側原点時 (161:反モータ側原点時) 124±1(注1) ケーブル固定位置(注3) (55:モータ側原点時) 55±2:反モータ側原点時 18±1(注1) 有効ストローク 21 2-φ3H7 深さ6 4-M4x0.7 深さ8 68 35 C ) 4 (φ3 59 34.5 15 49 L L+45(ブレーキ付) 50 Ax50 B-M5x0.8 深さ8 単軸 182.5(ブレーキ付) 137.5 41 25 有効ストローク L A B C D 質量(kg)注5 50 266 2 3 95 50 1.5 100 316 3 4 145 100 1.6 150 366 4 5 195 150 1.7 200 416 5 6 245 200 1.8 250 466 6 7 295 250 2.0 300 516 7 8 345 300 2.1 350 566 8 9 395 350 2.2 400 616 9 10 445 400 2.3 D 2 スカラ 162.5 207.5(ブレーキ付) 直交 +0.012 )深さ φ4H7( 6 0 +0.02 深さ6 4 0 R 注1. 両端からのメカストッパによる停止位置です。 注2. φ6吸引用エアー継手の取付方向は左右の選択が可能です。 本図面の継手取付方向はRJ(標準)側で作図されています。 注3. ケーブルに負荷が掛からないよう、本体端面より100mm以内で結束バンド等にて固定してください。 注4. ケーブルの最小曲げ半径はR30です。 注5. ブレーキなしの質量です。ブレーキ付はブレーキなしの質量より0.2kg重くなります。 適用コントローラ TS-S2 u 446 TS-SD u 459 401 各種情報 (15) 176(ブレーキ付) 131 取付方向:LJ 45 51(スライダー上面) 0.5 2-φ6吸引用エア継手 取付方向:RJ(注2) コントローラ 169±1(ブレーキ付)(注1) 206±2(ブレーキ付):モータ側原点時 (206 ブレーキ付:反モータ側原点時) 12.5 CONTROLLER INFORMATION 33 (ノック間公差±0.02) 40.5 8 20.5 24 15 30.5 13 クリーン (単位:mm) C リード 水平使用時 A 1kg 807 2kg 667 12 2kg 687 3kg 556 6 4kg 567 4kg 869 6kg 863 2 B A C B CLEAN MY YP-X ■ 静的許容モーメント A リード 42□ステップモータ ±0.02 ボールネジφ8(C10級) 0.27 12 6 2 600 300 100 2 4 6 1 2 4 最大押付力(N) 45 90 150 ストローク(mm) 50 ∼ 400(50ピッチ) 水平使用時 ストローク+216 全長(mm) 垂直使用時 ストローク+261 本体断面最大外形(mm) W49×H59 ケーブル長(m) 標準:1 / オプション:3, 5, 10 クリーン度 CLASS 10※2 リード12 リード6 リード2 吸引量(Nℓ/min)エアー 50 30 15 ピック&プレイス 1 I/Oケーブル 1:1m ■ 許容オーバーハング量※ モーター 1 繰り返し位置決め精度※( mm) 減速機構 モータ最大トルク(N・m) ボールネジリード(mm) 最高速度(mm/sec) 水平使用時 最大可搬質量 (kg) 垂直使用時 (アブソ仕様) B:有り (インクリ仕様) N:なし YK-XG ロボットドライバ SD:TS-SD バッテリ※3 ー スカラロボット SD ※1. ロボットケーブルは耐屈曲ケーブルです。 ※2. DINレールについてはP.454をご参照ください。 ※3. バッテリの有無はTS-SHをご使用の場合のみ選択してください。 ■ 基本仕様 入出力 NP:NPN PN:PNP CC:CC-Link DN:DeviceNet EP:EtherNet/IP XY-X ロボットポジショナ S2:TS-S2※2 SH:TS-SH 直交ロボット ー 継手取付方向 ー 原点位置 ー ストローク ー ケーブル長 (標準) N:標準原点 RJ:右 1L:1m 50 ∼ 400 LJ:左 Z:反モータ側 (50mmピッチ) 3L:3m 5L:5m 10L:10m PHASER ー ※1 リニア単軸ロボット ブレーキ N:ブレーキなし B:ブレーキ付き ー FLIP-X タイプ S:ストレート ー 単軸ロボット ー リード指定 12:12mm 6:6mm 2:2mm ー 小型単軸ロボット ロボット本体 ー TRANSERVO S ー LCM100 SSC04 リニアコンベアモジュール 注文型式 アプリケーション ● 標準CE対応 APPLICATION SSC04 アプリケーション LCM100 リニアコンベアモジュール ● ハイリード:リード20 ● 標準CE対応 注文型式 SSC05 ロボット本体 小型単軸ロボット TRANSERVO ※1. ※2. ※3. ※4. S ー ー リード指定 20:20mm 12:12mm 6:6mm ー タイプ ブレーキ S:ストレート N:ブレーキなし B:ブレーキ付き ー ー ー ー ー 継手取付方向 ー 原点位置 ー ストローク ー ケーブル長 (標準) N:標準原点 RJ:右 1L:1m 50 ∼ 800 LJ:左 Z:反モータ側 (50mmピッチ) 3L:3m 5L:5m 10L:10m ※1 ロボットポジショナ ※2 入出力 S2:TS-S2※3 SH:TS-SH SD リード12mm、6mmの場合のみ、ブレーキ付きを選択できます。 ロボットケーブルは耐屈曲ケーブルです。 DINレールについてはP.454をご参照ください。 バッテリの有無はTS-SHをご使用の場合のみ選択してください。 I/Oケーブル 1:1m FLIP-X 単軸ロボット ■ 許容オーバーハング量※ B A C B C C A (単位:mm) B C リード 372 265 300 263 496 377 355 12 リード リード 123 51 57 31 63 35 22 垂直使用時 リード リード 水平使用時 (単位:mm) 壁面取付使用時 A B C A 2kg 413 139 218 2kg 192 4kg 334 4kg 67 120 20 92 20 4kg 347 4kg 109 72 139 6kg 335 6kg 47 95 12 63 12 4kg 503 4kg 134 78 165 8kg 332 6kg 37 79 76 6 6 10kg 344 8kg 29 62 47 リード YK-XG スカラロボット YP-X ピック&プレイス 50 MY リード XY-X 直交ロボット 80 ■ 静的許容モーメント A リード PHASER リニア単軸ロボット モーター 42□ステップモータ 1 繰り返し位置決め精度※( ±0.02 mm) 減速機構 ボールネジφ12(C10級) モータ最大トルク (N・m) 0.27 ボールネジリード(mm) 20 12 6 ※2 最高速度(mm/sec) 1000 600 300 水平使用時 4 6 10 最大可搬質量 (kg) 垂直使用時 ー 1 2 最大押付力(N) 27 45 90 ストローク(mm) 50 ∼ 800(50ピッチ) 水平使用時 ストローク+230 全長(mm) 垂直使用時 ストローク+270 本体断面最大外形(mm) W55×H56 ケーブル長(m) 標準:1 / オプション:3, 5, 10 クリーン度 CLASS 10※3 リード20 リード12 リード6 吸引量 (Nℓ/min)エアー (アブソ仕様) B:有り (インクリ仕様) N:なし 1 ロボットドライバ SD:TS-SD ■ 基本仕様 バッテリ※4 ー NP:NPN PN:PNP CC:CC-Link DN:DeviceNet EP:EtherNet/IP 6 0.5kg 1kg 1kg 2kg MR MP (単位:mm) A C 578 286 312 148 579 286 312 148 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です(寿命計算時のストロー クは600mm)。 (単位:N・m) MY 25 MP 33 MR 30 ■ 適用コントローラ コントローラ TS-S2 TS-SH TS-SD 運転方法 ポイントトレース/ リモートコマンド パルス列 30 ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロ−クが650mmを超える時、動作領域によってはボ−ルネジ の共振が発生する場合があります(危険速度)。その時は図面下部の 表に示す最高速度を目安として速度を下げ調整をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 SSC05 約200(ケーブル長さ) 30.5 13 ケーブル固定位置(注3) 178±2:モータ側原点時 (178:反モータ側原点時) 140±1(注1) 2-φ4H7 深さ6 4-M4x0.7 深さ8 24 14±1(注1) 各種情報 (17) C 70 42 ) 4 (φ3 51 56 取付方向:LJ 36 コントローラ CONTROLLER INFORMATION 180±1 (ブレーキ付)(注1) 218±2(ブレーキ付):モータ側原点時 (218 ブレーキ付:反モータ側原点時) 178(ブレーキ付) 138 12.5 2-φ6吸引用エア継手 取付方向:RJ(注2) 42 (ノック間公差 ±0.02) 40.5 クリーン CLEAN 15 34 8 20.5 (52:モータ側原点時) 52±2:反モータ側原点時 有効ストローク 24 55 L L+40(ブレーキ付) 141.5(ブレーキ付) 101.5 57(スライダー上面) (0.5) APPLICATION SSC05 53 50 34 Ax50 B-M6x1 深さ8 50 単軸 直交 +0.02 深さ6 4 0 R +0.012 )深さ φ4H7( 6 0 126.5 D スカラ 166.5(ブレーキ付) 有効ストローク L A B C D 質量(kg)注5 50 280 3 4 90 100 2.1 100 330 4 5 140 150 2.3 150 380 5 6 190 200 2.5 200 430 6 7 240 250 2.7 ストローク別 リード20 最高速度注6 リード12 (mm/sec) リード6 402 適用コントローラ 250 480 7 8 290 300 2.8 300 350 530 580 8 9 9 10 340 390 350 400 3.0 3.2 1000 600 300 400 630 10 11 440 450 3.4 450 680 11 12 490 500 3.6 500 730 12 13 540 500 3.8 550 780 13 14 590 500 4.0 TS-S2 u 446 TS-SD u 600 830 14 15 640 500 4.2 650 880 15 16 690 500 4 .4 933 560 280 459 700 930 16 17 740 500 4.6 833 500 250 750 980 17 18 790 500 4.8 733 440 220 800 1030 18 19 840 500 5.0 633 380 190 2 注1. 両端からのメカストッパによる停止位置です。 注2. φ6吸引用エアー継手の取付方向は左右の選択が可能です。 本図面の継手取付方向はRJ(標準) 側で作図さ れています。 注3. ケーブルに負荷が掛からないよう、本体端面より 100mm以内で結束バンド等にて固定してください。 注4. ケーブルの最小曲げ半径はR30です。 注5. ブレーキなしの質量です。ブレーキ付はブレー キなしの質量より0.2kg重くなります。 注6. ストロークが650mmを超えるとき、動作領域に よってはボールネジの共振が発生する場合があ ります(危険速度)。 その時は左記の表に示す最高速度を目安としてプ ログラム上で速度を下げる調整をしてください。 12 6 C 458 224 244 113 459 224 245 113 (単位:N・m) MY 32 MP 38 MR 34 ■ 適用コントローラ コントローラ TS-S2 TS-SH TS-SD 運転方法 ポイントトレース/ リモートコマンド パルス列 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です(寿命計算時のストロー クは600mm)。 ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロ−クが650mmを超える時、動作領域によってはボ−ルネジ の共振が発生する場合があります(危険速度) 。その時は図面下部の 表に示す最高速度を目安として速度を下げ調整をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 SSC05H 約200(ケーブル長さ) 223.5±2:モータ側原点時 (223.5:反モータ側原点時) 175.5±1(注1) 43 24 ケーブル固定位置(注3) (62.5:モータ側原点時) 62.5±2:反モータ側原点時 14.5±1(注1) 有効ストローク 2-φ4H7 深さ6 4-M5x0.8 深さ10 40.5 51 L L+20(ブレーキ付) 161.5(ブレーキ付) 141.5 60(スライダー上面) (0.5) (φ 34 ) 56 36 24 55 55 52 34 Ax50 B-M6x1 深さ8 50 有効ストローク リード20 ストローク別 リード12(水平) 最高速度注6 リード12(垂直) (mm/sec) リード6(水平) リード6(垂直) 50 336 3 4 90 100 2.4 100 386 4 5 140 150 2.6 150 436 5 6 190 200 2.8 200 486 6 7 240 250 3.0 250 536 7 8 290 300 3.2 300 350 586 636 8 9 9 10 340 390 350 400 3.4 3.6 1000 600 500 300 250 400 686 10 11 440 450 3.8 450 736 11 12 490 500 4.0 500 786 12 13 540 500 4.2 適用コントローラ 550 836 13 14 590 500 4.4 600 886 14 15 640 500 4.5 650 936 15 16 690 500 4 .7 933 560 700 986 16 17 740 500 4.9 833 500 280 250 +0.02 4 0 深さ6 2 750 800 1036 1086 17 18 18 19 790 840 500 500 5.1 5 .3 733 633 440 380 440 380 220 190 220 190 注1. 両端からのメカストッパによる停止位置です。 注2. φ6吸引用エアー継手の取付方向は左右 の選択が可能です。 本図面の継手取付方向はRJ(標準)側で作 図されています。 注3. ケーブルに負荷が掛からないよう、本体端面 より100mm以内で結束バンド等にて固定し てください。 注4. ケーブルの最小曲げ半径はR30です。 注5. ブレーキなしの質量です。 ブレーキ付はブ レーキなしの質量より0.2kg重くなります。 注6. ストロークが650mmを超えるとき、動作 領域によってはボールネジの共振が発生 する場合があります(危険速度)。 その時は左記の表に示す最高速度を目安と してプログラム上で速度を下げる調整をし てください。 TS-S2 u 446 TS-SD u 459 スカラ L A B C D 質量(kg)注5 D 直交 +0.012 )深さ φ4H7( 6 0 166.5 186.5(ブレーキ付) 単軸 R 403 各種情報 (17) C 90 53 取付方向:LJ コントローラ 2-φ6吸引用エア継手 取付方向:RJ(注2) CONTROLLER INFORMATION 195.5±1 (ブレーキ付)(注1) 243.5±2(ブレーキ付):モータ側原点時 (243.5 ブレーキ付:反モータ側原点時) 214(ブレーキ付) 194 12.5 43 (ノック間公差 ±0.02) 8 20.5 15 30.5 13 クリーン 1kg 2kg 2kg 4kg MP (単位:mm) A CLEAN 554 309 262 449 334 305 519 413 355 338 MR YP-X 203 88 49 96 55 34 62 39 26 17 垂直使用時 ピック&プレイス 291 148 104 179 118 88 136 100 78 64 (単位:mm) B C YK-XG 225 109 71 118 79 56 83 61 47 39 リード C C A リード 壁面取付使用時 A 2kg 262 4kg 118 20 6kg 71 4kg 146 6kg 85 12 8kg 55 6kg 101 8kg 64 10kg 43 6 12kg 28 (単位:mm) B C リード リード 吸引量(Nℓ/min)エアー 水平使用時 A 2kg 599 4kg 366 20 6kg 352 4kg 500 6kg 399 12 8kg 403 6kg 573 8kg 480 10kg 442 6 12kg 465 B A C B リード 最大押付力(N) ストローク(mm) 水平使用時 全長(mm) 垂直使用時 本体断面最大外形(mm) ケーブル長(m) クリーン度 MY リード 垂直使用時 ■ 静的許容モーメント リード 最大可搬質量 (kg) I/Oケーブル 1:1m A リード 水平使用時 垂直使用時 水平使用時 最高速度※2 (mm/sec) 42□ステップモータ ±0.02 ボールネジφ12(C10級) 0.47 20 12 6 1000 600 300 ー 500 250 6 8 12 ー 2 4 36 60 120 50 ∼ 800(50ピッチ) ストローク+286 ストローク+306 W55×H56 標準:1 / オプション:3, 5, 10 CLASS 10※3 リード20 リード12 リード6 80 50 30 (アブソ仕様) B:有り (インクリ仕様) N:なし 1 ロボットドライバ SD:TS-SD ■ 許容オーバーハング量※ モーター 1 繰り返し位置決め精度※( mm) 減速機構 モータ最大トルク (N・m) ボールネジリード(mm) バッテリ※4 ー スカラロボット SD リード12mm、6mmの場合のみ、ブレーキ付きを選択できます。 ロボットケーブルは耐屈曲ケーブルです。 DINレールについてはP.454をご参照ください。 バッテリの有無はTS-SHをご使用の場合のみ選択してください。 ■ 基本仕様 入出力 NP:NPN PN:PNP CC:CC-Link DN:DeviceNet EP:EtherNet/IP XY-X ロボットポジショナ S2:TS-S2※3 SH:TS-SH 直交ロボット ー 継手取付方向 ー 原点位置 ー ストローク ー ケーブル長 (標準) N:標準原点 RJ:右 1L:1m 50 ∼ 800 LJ:左 Z:反モータ側 (50mmピッチ) 3L:3m 5L:5m 10L:10m PHASER ー ※2 リニア単軸ロボット ー FLIP-X ブレーキ N:ブレーキなし B:ブレーキ付き ー 単軸ロボット タイプ S:ストレート ー 小型単軸ロボット ー リード指定 20:20mm 12:12mm 6:6mm ー ※1 TRANSERVO ロボット本体 ※1. ※2. ※3. ※4. S ー LCM100 SSC05H リニアコンベアモジュール 注文型式 アプリケーション ● ハイリード:リード20 ● 標準CE対応 APPLICATION SSC05H APPLICATION アプリケーション LCM100 リニアコンベアモジュール TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット C4L ● 原点反モータ ● 適用コントローラ24V仕様 注文型式 C4L ー ー ー ー ー ー ー ERCD ー ー 継手取付方向 ー 原点位置変更 ー ストローク ー ケーブル長※1 ー 適用コントローラ ー ロボット本体 ー リード指定 ー ブレーキ I/Oコネクタ仕様 無記入:ブレーキなし L J:左 (標準) なし:標準 CN1:I/Oフラットケーブル1m(標準) 12:12mm 1L:1m 50 ∼ 400 CN2:ツイストペアケーブル2m(パルス列仕様) 6:6mm BK:ブレーキ付き RJ:右 Z:反モータ側 (50mmピッチ) 3L:3.5m 2:2mm 5L:5m 10L:10m 1K/3K/5K/10K (耐屈曲) ※1. 標準ロボットケーブルは固定用ケーブルです(1L/3L/5L/10L)。耐屈曲ケーブルの選択も可能です。詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ■ 許容オーバーハング量※ モーター出力 AC(W) 1 繰り返し位置決め精度※( mm) MY (単位:mm) 2 103 27 109 27 MR (単位:mm) 垂直使用時 (単位:mm) B C A C 52 368 0 139 22 370 0 185 23 1150 0 420 12 6 リード 6 3kg 6kg 3kg 6kg C A リード 3kg 511 6kg 336 3kg 1571 6kg 751 179 74 135 62 142 66 リード 2 87 32 58 26 58 27 リード リード 6 C 壁面取付使用時 A 2kg 145 46 12 4.5kg リード B C リード 水平使用時 A 2kg 429 219 12 4.5kg B A C B リード 2 1.2kg 121 122 2.4kg 52 54 3kg 7.2kg 37 0 39 0 MP (単位:N・m) MY 15 MP 19 MR 18 ■ 適用コントローラ コントローラ ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 ※ 寿命計算時のストロークは300mmです。 運転方法 パルス列 プログラム ポイントトレース リモートコマンド オンライン命令 ERCD C4L 約250(モータケーブル長さ) 44 24 φ3H7 深さ7 4-M4×0.7 深さ 10 37 23 R 2 (3) コントローラ φ6吸引用エアー継手 3H7 深さ 7 φ6吸引用エアー継手 116±2(ブレーキ付)(注1) 167±3(ブレーキ付) 1.6 23.5 φ4 41.6 (45) 59.5 単軸 (3:ネジ頭) (2) アース端子(M4) LJ(注4) L L+35(ブレーキ付) 145(ブレーキ付) 110 2 S R 31 直交 φ4H7 深さ 6 スカラ 90 125(ブレーキ付) A-M4×0.7 深さ 6 B×C (C) E 有効ストローク 50 100 150 200 250 300 350 400 255 305 355 405 455 505 555 605 4 6 6 8 8 10 10 10 1 2 2 2 2 3 3 4 150 100 125 125 125 125 125 125 0 0 0 50 100 25 75 0 70 120 170 220 270 320 370 420 注3 本体質量(kg) 1.4 1.5 1.7 1.8 2 2.1 2.3 2.4 720 ストローク別 リード12 最高速度 リード6 360 (mm/sec) リード2 120 L A B C E S 404 適用コントローラ ERCD u 468 注1. 注2. 注3. 注4. 注5. 45 28 55 (95) (90) 110.5(ブレーキ付) 75.5 18 各種情報 CONTROLLER INFORMATION 45 クリーン CLEAN 81±2(注1) 73±3 反モータ側 原点位置 22±1(注1) 有効ストローク 132±3 モータ側原点位置 1 YP-X ピック&プレイス ※1. 片振りでの繰り返し位置決め精度。 ※2. ISO14644-1相当、吸引ブロア使用時。 ※3. 必要吸引量は使用状態・使用環境で異なります。 4 H7 深さ 6 YK-XG スカラロボット 定格推力(N) ストローク(mm) 水平使用時 全長(mm) 垂直使用時 本体断面最大外形(mm) ケーブル長(m) クリーン度 吸引量 (Nℓ/min)エアー※3 ■ 静的許容モーメント A リード XY-X 直交ロボット 減速機構 ボールネジリード(mm) 最高速度(mm/sec) 水平使用時 最大可搬質量 (kg) 垂直使用時 30 ±0.02 ボールネジφ8(C10級) 12 6 2 720 360 120 4.5 6 6 1.2 2.4 7.2 32 64 153 50 ∼ 400(50ピッチ) ストローク+205 ストローク+240 W45×H55 標準:3.5 / オプション:1,5,10 CLASS 3※2 50 30 15 38 PHASER リニア単軸ロボット ■ 基本仕様 両端からのメカストッパ位置です。 モータケーブルの最小曲げ半径はR30です。 ブレーキなしの質量です。ブレーキ付きは本体質量表中の値より0.2㎏重くなります。 φ6吸引用エアー継手の取り付け方向は、左右の選択が可能です。(左が標準です。) C4LとC4LHの外観図は同一です。 RJ(注4) ー 05 ー ロボットドライバ ー ドライバ : モータ容量 05:100W以下 ■ 許容オーバーハング量※ モーター出力 AC(W) 1 繰り返し位置決め精度※( mm) MY (単位:mm) 3kg 6kg 2 3kg 6kg MR (単位:mm) 垂直使用時 (単位:mm) B C A C 72 20 41 10 41 10 295 111 254 127 805 290 12 6 リード 6 101 27 110 28 C A リード 352 6kg 234 3kg 1105 6kg 520 3kg 174 72 133 62 142 66 リード 2 90 37 58 27 59 27 リード リード 6 C 壁面取付使用時 A 2kg 136 44 12 4.5kg リード B C リード 水平使用時 A 2kg 339 169 12 4.5kg B A C B リード 定格推力(N) ストローク(mm) 水平使用時 全長(mm) 垂直使用時 本体断面最大外形(mm) ケーブル長(m) クリーン度 吸引量(Nℓ/min)エアー※3 ■ 静的許容モーメント A リード 減速機構 ボールネジリード(mm) 最高速度(mm/sec) 水平使用時 最大可搬質量 (kg) 垂直使用時 30 ±0.02 ボールネジφ8(C10級) 12 6 2 720 360 120 4.5 6 6 1.2 2.4 7.2 32 64 153 50 ∼ 400(50ピッチ) ストローク+205 ストローク+240 W45×H55 標準:3.5 / オプション:5,10 CLASS 3※2 50 30 15 クリーン ■ 基本仕様 ー CLEAN RDX ー ー バッテリ ドライバ : モータ容量 ー CE対応 ー 入出力 無記入:標準 05:100W以下 N:NPN B:有り (アブソ) E:CE仕様 P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ) PB:Profibus YP-X 05 コントローラ ピック&プレイス SR1-X YK-XG 3K/5K/10K (耐屈曲) スカラロボット ー TSモニタ ー ー バッテリ 入出力 ドライバ : 電源電圧/モータ容量 無記入:なし NP:NPN B:有り (アブソ) 105:100V/100W以下 L:LCD付き PN:PNP 205:200V/100W以下 CC:CC-Link N:なし DN:DeviceNet (インクリ) EP:EtherNet/IP TS-X ※1. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※2. DINレールについてはP.454をご参照ください。 ー XY-X ポジショナ※2 ー 直交ロボット ー 継手取付方向 ー 原点位置変更 ー ストローク ー ケーブル長※1 ロボット本体 ー リード指定 ー ブレーキ 無記入:ブレーキなし L J:左 (標準) なし:標準 12:12mm 3L:3.5m 50 ∼ 400 6:6mm BK:ブレーキ付き RJ:右 Z:反モータ側 (50mmピッチ) 5L:5m 2:2mm 10L:10m ー PHASER TSX ー リニア単軸ロボット ー FLIP-X ー 単軸ロボット ー 小型単軸ロボット ー TRANSERVO ー LCM100 C4LH リニアコンベアモジュール 注文型式 アプリケーション ● 適用コントローラ100V/200V仕様 APPLICATION C4LH ● 原点反モータ 2 1.2kg 118 118 2.4kg 52 54 3kg 7.2kg 38 0 39 0 MP (単位:N・m) MY 15 MP 19 MR 18 ■ 適用コントローラ コントローラ SR1-X05 RCX221/222 RCX240/340 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 ※ 寿命計算時のストロークは300mmです。 TS-X105 TS-X205 RDX-05 ※1. 片振りでの繰り返し位置決め精度。 ※2. ISO14644-1相当、吸引ブロア使用時。 ※3. 必要吸引量は使用状態・使用環境で異なります。 運転方法 プログラム/ ポイントトレース/ リモートコマンド/ オンライン命令 ポイントトレース/ リモートコマンド パルス列 C4LH 約250(モータケーブル長さ) 81±2(注1) 73±3 反モータ側 原点位置 22±1(注1) 有効ストローク 132±3 モータ側原点位置 44 24 37 23 38 2 (3) φ6吸引用エアー継手 3H7 深さ 7 167±3(ブレーキ付) (2) アース端子(M4) LJ(注4) L L+35(ブレーキ付) 145(ブレーキ付) 110 RJ(注4) 2 S 31 4 H7 深さ 6 R 直交 φ4H7 深さ 6 45 28 単軸 (3:ネジ頭) 41.6 (45) 59.5 φ4 1 1.6 23.5 55 (95) (90) A-M4×0.7 深さ 6 B×C (C) E スカラ 90 125(ブレーキ付) 有効ストローク 50 100 150 200 250 300 350 400 255 305 355 405 455 505 555 605 4 6 6 8 8 10 10 10 1 2 2 2 2 3 3 4 150 100 125 125 125 125 125 125 0 0 0 50 100 25 75 0 70 120 170 220 270 320 370 420 注3 本体質量(kg) 1.4 1.5 1.7 1.8 2 2.1 2.3 2.4 720 ストローク別 リード12 最高速度 リード6 360 (mm/sec) リード2 120 L A B C E S 適用コントローラ 注1. 注2. 注3. 注4. 注5. 両端からのメカストッパ位置です。 モータケーブルの最小曲げ半径はR30です。 ブレーキなしの質量です。ブレーキ付きは本体質量表中の値より0.2㎏重くなります。 φ6吸引用エアー継手の取り付け方向は、左右の選択が可能です。(左が標準です。) C4LとC4LHの外観図は同一です。 SR1-X u 472 TS-X u 446 RDX u 463 405 各種情報 110.5(ブレーキ付) 75.5 18 コントローラ R φ6吸引用エアー継手 116±2(ブレーキ付)(注1) CONTROLLER INFORMATION 45 φ3H7 深さ7 4-M4×0.7 深さ 10 LCM100 リニアコンベアモジュール TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット PHASER リニア単軸ロボット 注文型式 C5L ー ー ー ー ー ー ー ERCD ー ー 継手取付方向 ー 原点位置変更 ー ストローク ー ケーブル長※2 ー 適用コントローラ ー ロボット本体 ー リード指定 ー ブレーキ※1 I/Oコネクタ仕様 (標準) なし:標準 CN1:I/Oフラットケーブル1m(標準) 20:20mm 無記入:ブレーキなし L J:左 1L:1m 50 ∼ 800 CN2:ツイストペアケーブル2m(パルス列仕様) 12:12mm BK:ブレーキ付き RJ:右 Z:反モータ側 (50mmピッチ) 3L:3.5m 6:6mm 5L:5m 10L:10m 1K/3K/5K/10K (耐屈曲) ※1. リード20mmの場合はブレーキ付き仕様(垂直仕様)を選択できません。 ※2. 標準ロボットケーブルは固定用ケーブルです(1L/3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ■ 基本仕様 ■ 許容オーバーハング量※ モーター出力 AC(W) 1 繰り返し位置決め精度※( mm) 減速機構 ボールネジリード (mm) MY 745 251 406 155 294 89 12 6 2kg 5kg 3kg 9kg 364 123 259 50 MR (単位:mm) 垂直使用時 (単位:mm) B C A C 303 1505 87 605 126 1073 28 438 72 354 0 154 12 リード 324 104 159 59 104 31 C A リード C リード 6 B 壁面取付使用時 A 1kg 679 3kg 215 20 リード リード 12 2kg 1166 5kg 551 3kg 1194 9kg 624 (単位:mm) C リード 水平使用時 A 1kg 1584 3kg 699 20 B A C B リード YK-XG スカラロボット 定格推力(N) ストローク(mm) 水平使用時 全長(mm) 垂直使用時 本体断面最大外形(mm) ケーブル長(m) クリーン度 吸引量 (Nℓ/min)エアー※3 ■ 静的許容モーメント A リード XY-X 直交ロボット 最高速度(mm/sec) 水平使用時 最大可搬質量 (kg) 垂直使用時 30 ±0.02 ボールネジφ12(C10級) 20 12 6 1000 800 400 3 5 9 ー 1.2 2.4 19 32 64 50 ∼ 800(50ピッチ) ストローク+201.5 ストローク+236.5 W55×H65 標準:3.5 / オプション:1,5,10 CLASS 3※2 80 50 30 6 1.2kg 246 245 2.4kg 110 110 MP (単位:N・m) MY 30 MP 34 MR 40 ■ 適用コントローラ コントローラ ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 ※ 寿命計算時のストロークは600mmです。 運転方法 パルス列 プログラム ポイントトレース リモートコマンド オンライン命令 ERCD YP-X ピック&プレイス ※1. 片振りでの繰り返し位置決め精度。 ※2. ISO14644-1相当、吸引ブロア使用時。 ※3. 必要吸引量は使用状態・使用環境で異なります。 C5L 約250(モータケーブル長さ) 75.5±3 反モータ側 原点位置 有効ストローク φ4H7 深さ7 4-M4×0.7 深さ10 55 34 23 40 (3) コントローラ φ6吸引用エアー継手 4H7 深さ 7 (101) (96) 59 51.5 (55) φ41 18 各種情報 CONTROLLER INFORMATION R φ6吸引用エアー継手 107±2(ブレーキ付)(注1) 161±3(ブレーキ付) 2 21.5±1(注1) 55 39.5 クリーン CLEAN 126±3 モータ側原点位置 72±2(注1) 1.7 アプリケーション ● 適用コントローラ24V仕様 ● 原点反モータ アース端子(M4) 単軸 (3:ネジ頭) 79 (2) 114(ブレーキ付) 25 L 50 32 65 APPLICATION C5L ● ハイリード:リード20 LJ(注4) RJ(注4) L+35(ブレーキ付) 160.5(ブレーキ付) 125.5 2 S R 38 直交 4 H7 深さ 6 φ4H7 深さ6 スカラ 77 B×200 112(ブレーキ付) A-M5×0.8 深さ 6 E 有効ストローク 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 251 . 5301 . 5351 . 5401 . 5451 . 5501 . 5551 . 5601 . 5651 . 5701 . 5751 . 5801 . 5851 . 5901 . 5951 . 5 1001.5 4 4 4 6 6 6 6 8 8 8 8 10 10 10 10 12 0 0 0 1 1 1 1 2 2 2 2 3 3 3 3 4 100 200 200 100 100 200 200 100 100 200 200 100 100 200 200 100 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 本体質量 (kg) 注 3 1.7 2.0 2.2 2.5 2.7 3.0 3.2 3.4 3.7 3.9 4.2 4.4 4.7 4.9 5.1 5.4 リード 20 1000 900 800 700 ストローク別 速度設定 ー 90 % 80 % 70 % 注5 最高速度 リード 12 800 640 560 480 440 (mm/sec) リード 6 400 320 280 240 220 速度設定 ー 80 % 70 % 60 % 55 % L A B E S 406 適用コントローラ ERCD u 468 注1. 両端からのメカストッパ位置です。 注2. モータケーブルの最小曲げ半径はR30です。 注3. ブレーキなしの質量です。ブレーキ付きはブレーキな しの本体質量表中の値より0.2kg重くなります。 注4. φ6吸引用エアー継手の取り付け方向は、 左右の選択 が可能です。 (左が標準です。) 注5. ストロークが600mmを超えるとき、動作領域によっ てはボールネジの共振が発生する場合があります(危 険速度)。その時は左記の表に示す最高速度を目安と して動作速度を下げる調整をしてください。 注6. C5LとC5LHの外観図は同一です。 ー 05 ー ロボットドライバ ー ドライバ : モータ容量 05:100W以下 ■ 許容オーバーハング量※ モーター出力 AC(W) 1 繰り返し位置決め精度※( mm) 減速機構 ボールネジリード (mm) MY 645 241 398 152 294 89 2kg 12 5kg 6 3kg 9kg 347 119 259 50 MR (単位:mm) 垂直使用時 (単位:mm) B C A C 303 87 141 44 87 15 950 432 800 355 950 385 12 リード 324 104 159 60 105 31 C A リード C リード 6 B 壁面取付使用時 A 1kg 602 3kg 197 20 リード リード 12 916 5kg 436 3kg 1194 9kg 624 2kg (単位:mm) C リード 水平使用時 A 1kg 1099 3kg 488 20 B A C B リード 定格推力(N) ストローク(mm) 水平使用時 全長(mm) 垂直使用時 本体断面最大外形(mm) ケーブル長(m) クリーン度 吸引量(Nℓ/min)エアー※3 ■ 静的許容モーメント A リード 最高速度(mm/sec) 水平使用時 最大可搬質量 (kg) 垂直使用時 30 ±0.02 ボールネジφ12(C10級) 20 12 6 1000 800 400 3 5 9 ー 1.2 2.4 19 32 64 50 ∼ 800(50ピッチ) ストローク+201.5 ストローク+236.5 W55×H65 標準:3.5 / オプション:5,10 CLASS 3※2 80 50 30 クリーン ■ 基本仕様 ー CLEAN RDX ー ー バッテリ ドライバ : モータ容量 ー CE対応 ー 入出力 無記入:標準 05:100W以下 N:NPN B:有り (アブソ) E:CE仕様 P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ) PB:Profibus YP-X 05 コントローラ ピック&プレイス SR1-X YK-XG 3K/5K/10K (耐屈曲) スカラロボット ー TSモニタ ー ー バッテリ 入出力 ドライバ : 電源電圧/モータ容量 無記入:なし NP:NPN B:有り (アブソ) 105:100V/100W以下 L:LCD付き PN:PNP 205:200V/100W以下 CC:CC-Link N:なし DN:DeviceNet (インクリ) EP:EtherNet/IP TS-X ※1. リード20mmの場合はブレーキ付き仕様(垂直仕様)を選択できません。 ※2. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※3. DINレールについてはP.454をご参照ください。 ー XY-X ポジショナ※3 ー 直交ロボット ー 継手取付方向 ー 原点位置変更 ー ストローク ー ケーブル長※2 ロボット本体 ー リード指定 ー ブレーキ※1 (標準) なし:標準 20:20mm 無記入:ブレーキなし L J:左 3L:3.5m 50 ∼ 800 12:12mm BK:ブレーキ付き RJ:右 Z:反モータ側 (50mmピッチ) 5L:5m 6:6mm 10L:10m ー PHASER TSX ー リニア単軸ロボット ー FLIP-X ー 単軸ロボット ー 小型単軸ロボット ー TRANSERVO ー LCM100 C5LH リニアコンベアモジュール 注文型式 アプリケーション ● 適用コントローラ100V/200V仕様 ● 原点反モータ APPLICATION C5LH ● ハイリード:リード20 6 1.2kg 240 239 2.4kg 109 110 MP (単位:N・m) MY 30 MP 34 MR 40 ■ 適用コントローラ コントローラ SR1-X05 RCX221/222 RCX240/340 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 ※ 寿命計算時のストロークは600mmです。 TS-X105 TS-X205 RDX-05 ※1. 片振りでの繰り返し位置決め精度。 ※2. ISO14644-1相当、吸引ブロア使用時。 ※3. 必要吸引量は使用状態・使用環境で異なります。 運転方法 プログラム/ ポイントトレース/ リモートコマンド/ オンライン命令 ポイントトレース/ リモートコマンド パルス列 C5LH 75.5±3 反モータ側 原点位置 有効ストローク φ4H7 深さ7 4-M4×0.7 深さ10 55 34 2 23 40 (3) φ41 51.5 (55) 59 アース端子(M4) 25 L LJ(注4) RJ(注4) L+35(ブレーキ付) 160.5(ブレーキ付) 125.5 単軸 (3:ネジ頭) 79 (2) 114(ブレーキ付) 50 32 2 S R 38 直交 4 H7 深さ 6 φ4H7 深さ6 B×200 112(ブレーキ付) A-M5×0.8 深さ 6 スカラ 77 E 有効ストローク 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 251 . 5301 . 5351 . 5401 . 5451 . 5501 . 5551 . 5601 . 5651 . 5701 . 5751 . 5801 . 5851 . 5901 . 5951 . 5 1001.5 4 4 4 6 6 6 6 8 8 8 8 10 10 10 10 12 0 0 0 1 1 1 1 2 2 2 2 3 3 3 3 4 100 200 200 100 100 200 200 100 100 200 200 100 100 200 200 100 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 本体質量 (kg) 注 3 1.7 2.0 2.2 2.5 2.7 3.0 3.2 3.4 3.7 3.9 4.2 4.4 4.7 4.9 5.1 5.4 リード 20 1000 900 800 700 ストローク別 速度設定 ー 90 % 80 % 70 % 注5 最高速度 リード 12 800 640 560 480 440 (mm/sec) リード 6 400 320 280 240 220 速度設定 ー 80 % 70 % 60 % 55 % L A B E S 適用コントローラ SR1-X u 472 TS-X u 注1. 両端からのメカストッパ位置です。 注2. モータケーブルの最小曲げ半径はR30です。 注3. ブレーキなしの質量です。ブレーキ付きはブレーキな しの本体質量表中の値より0.2kg重くなります。 注4. φ6吸引用エアー継手の取り付け方向は、左右の選択 が可能です。 (左が標準です。) 注5. ストロークが600mmを超えるとき、動作領域によっ てはボールネジの共振が発生する場合があります(危 険速度)。その時は左記の表に示す最高速度を目安と して動作速度を下げる調整をしてください。 注6. C5LとC5LHの外観図は同一です。 446 RDX u 463 407 各種情報 1.7 (101) (96) 18 コントローラ φ6吸引用エアー継手 4H7 深さ 7 CONTROLLER INFORMATION R φ6吸引用エアー継手 107±2(ブレーキ付)(注1) 161±3(ブレーキ付) 21.5±1(注1) 55 39.5 126±3 モータ側原点位置 72±2(注1) 65 約250(モータケーブル長さ) LCM100 リニアコンベアモジュール 注文型式 C6L ー ー ー ー ー TSX ー ー 継手取付方向 ー 原点位置変更 ー ストローク ー ケーブル長※2 ロボット本体 ー リード指定 ー ブレーキ※1 (標準) なし:標準 20:20mm 無記入:ブレーキなし L J:左 3L:3.5m 50 ∼ 800 12:12mm BK:ブレーキ付き RJ:右 Z:反モータ側 (50mmピッチ) 5L:5m 6:6mm 10L:10m ー ポジショナ※3 TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット 3K/5K/10K (耐屈曲) SR1-X 05 コントローラ RDX ー ー ー ー バッテリ ドライバ : モータ容量 ー CE対応 ー 入出力 無記入:標準 05:100W以下 N:NPN B:有り (アブソ) E:CE仕様 P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ) PB:Profibus 05 ー ー RBR1 ロボットドライバ ー ドライバ : モータ容量 ー 05:100W以下 回生装置 ■ 許容オーバーハング量※ モーター出力 AC(W) 1 繰り返し位置決め精度※( mm) 減速機構 ボールネジリード (mm) MY 192 59 33 125 41 24 73 33 0 295 104 75 3kg 336 8kg 121 76 12 12kg 5kg 236 10kg 109 25 6 30kg 291 87 41 202 70 0 MR (単位:mm) 垂直使用時 (単位:mm) B C A C 1kg 353 351 174 365 2kg 163 164 44 105 18 71 12 4kg 68 70 96 13 0 45 5 0 317 110 126 237 97 0 リード 5kg C C A 169 71 21 2kg 4kg 6 8kg 170 73 24 MP (単位:N・m) MY 35 リード 6 10kg 30kg B リード 12kg 622 271 214 692 372 157 壁面取付使用時 A 2kg 300 6kg 83 20 10kg 43 リード 8kg 12 リード MP 40 MR 50 ■ 適用コントローラ コントローラ SR1-X05 RCX221/222 RCX240/340 運転方法 プログラム/ ポイントトレース/ リモートコマンド/ オンライン命令 TS-X105 ポイントトレース/ リモートコマンド TS-X205 RDX-05-RBR1 パルス列 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 ※ 寿命計算時のストロークは600mmです。 C6L 約250(モータケーブル長さ) 89.5±3 反モータ側原点位置 35.5±1(注1) 有効ストローク φ4H7 深さ7 4-M4×0.7 深さ 10 55 34 65 R φ6吸引用エアー継手 133.5(ブレーキ付) 98.5 (101) (96) 33 (2) アース端子(M4) LJ(注4) L L+35(ブレーキ付) S φ4H7 深さ6 50 32 RJ(注4) 2 R 直交 50 26 単軸 193(ブレーキ付) 158 4 H7 深さ6 (3:ネジ頭) 51.5 (55) 60.5 φ4 各種情報 1 18 φ6吸引用エアー継手 4H7 深さ7 139±2(ブレーキ付)(注1) 193±3(ブレーキ付) 23 (3) コントローラ CONTROLLER INFORMATION 39.5 クリーン CLEAN 158±3 モータ側原点位置 104±2(注1) 40 YP-X ピック&プレイス ※1. 片振りでの繰り返し位置決め精度。 ※2. ISO14644-1相当、吸引ブロア使用時。 ※3. 必要吸引量は使用状態・使用環境で異なります。 3kg (単位:mm) C リード 水平使用時 A 2kg 433 6kg 145 20 10kg 110 B A C B リード YK-XG スカラロボット 定格推力(N) ストローク(mm) 水平使用時 全長(mm) 垂直使用時 本体断面最大外形(mm) ケーブル長(m) クリーン度 吸引量 (Nℓ/min)エアー※3 ■ 静的許容モーメント A リード XY-X 直交ロボット 最高速度(mm/sec) 水平使用時 最大可搬質量 (kg) 垂直使用時 60 ±0.02 ボールネジφ12(C10級) 20 12 6 1000 800 400 10 12 30 ー 4 8 51 85 170 50 ∼ 800(50ピッチ) ストローク+247.5 ストローク+282.5 W65×H65 標準:3.5 / オプション:5,10 CLASS 3※2 80 50 30 2 PHASER リニア単軸ロボット ■ 基本仕様 ー ー TSモニタ ー ー バッテリ 入出力 ドライバ : 電源電圧/モータ容量 無記入:なし NP:NPN B:有り (アブソ) 105:100V/100W以下 L:LCD付き PN:PNP 205:200V/100W以下 CC:CC-Link N:なし DN:DeviceNet (インクリ) EP:EtherNet/IP TS-X ※1. リード20mmの場合はブレーキ付き仕様(垂直仕様)を選択できません。 ※2. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※3. DINレールについてはP.454をご参照ください。 ー 1.7 アプリケーション ● 原点反モータ 65 APPLICATION C6L ● ハイリード:リード20 106.5 スカラ 141.5(ブレーキ付) 40 A-M5×0.8 深さ 6 E B×200 有効ストローク 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 297 . 5347 . 5397 . 5447 . 5497 . 5547 . 5597 . 5647 . 5697 . 5747 . 5797 . 5847 . 5897 . 5947 . 5997 . 5 1047 . 5 10 10 10 12 12 12 12 14 14 14 14 16 16 16 16 18 0 0 0 1 1 1 1 2 2 2 2 3 3 3 3 4 150 200 200 100 100 200 200 100 100 200 200 100 100 200 200 100 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 本体質量 (kg) 注3 2.6 2.9 3.1 3.4 3.7 4.0 4.3 4.6 4.9 5.2 5.4 5.7 6.0 6.3 6.6 6.8 リード 20 1000 900 800 700 ー 90 % 80 % 70 % ストローク別 速度設定 注5 最高速度 リード 12 800 680 600 520 480 (mm/sec) リード 6 400 340 300 260 240 速度設定 ー 85 % 75 % 65 % 60 % L A B E S 408 適用コントローラ SR1-X u 472 TS-X u 注1. 両端からのメカストッパ位置です。 注2. モータケーブルの最小曲げ半径はR30です。 注3. ブレーキなしの質量です。ブレーキ付きは本体質量表 中の値より0.2㎏重くなります。 注4. φ6吸引用エアー継手の取り付け方向は、左右の選択 が可能です。 (左が標準です。) 注5. ストロークが600mmを超えるとき、動作領域によっ てはボールネジの共振が発生する場合があります(危 険速度)。その時は左記の表に示す最高速度を目安と して動作速度を下げる調整をしてください。 446 RDX u 463 05 ー ー RBR1 ロボットドライバ ー ドライバ : モータ容量 ー 05:100W以下 回生装置 ■ 許容オーバーハング量※ モーター出力 AC(W) 100 1 繰り返し位置決め精度※( ±0.02 mm) 減速機構 ボールネジ(C10級) ボールネジリード(mm) 20 12 6 ※2 最高速度 (mm/sec) 1000 720 360 水平使用時 12 20 40 最大可搬質量 (kg) 垂直使用時 ー 4 8 定格推力(N) 84 141 283 ストローク(mm) 150 ∼ 800(50ピッチ) 水平使用時 ストローク+320 全長(mm) 垂直使用時 ストローク+355 本体断面最大外形(mm) W80×H75 ケーブル長(m) 標準:3.5 / オプション:5,10 クリーン度 CLASS 10※3 吸引量(Nℓ/min)エアー 30 ∼ 90※4 MY B A C C C A MR MP (単位:N・m) MY 70 リード リード 水平使用時 (単位:mm) 壁面取付使用時 (単位:mm) 垂直使用時 (単位:mm) A B C A B C A C 5kg 245 5kg 121 1kg 440 442 85 146 71 211 10kg 131 10kg 2kg 207 209 39 69 42 24 88 20 12kg 115 3kg 130 132 31 57 20 12kg 29 16 66 12 5kg 364 5kg 164 4kg 92 192 78 328 91 92 10kg 207 10kg 2kg 237 238 43 92 62 29 158 15kg 144 15kg 4kg 106 26 41 26 12 83 96 12 12 20kg 112 20kg 6kg 18 40 7 4 32 62 62 6 10kg 406 10kg 8kg 47 124 87 33 353 34 40 20kg 225 20kg 20 54 18 6 127 30kg 162 30kg 11 31 0 0 0 6 6 40kg 168 40kg 7 20 0 0 0 リード リード リード リード リード リード ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロークが600mmを超えるとき、動作領域によってはボールネ ジの共振が発生する場合があります(危険速度)。その時は図面下部 の表に示す最高速度を目安としてプログラム上で速度を下げる調整 をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※4. 必要吸引量は使用状態・使用環境で異なります。 ■ 静的許容モーメント A B クリーン ー CLEAN ■ 基本仕様 ー YP-X RDX ー ー ドライバ : モータ容量 ー CE対応 ー 入出力 バッテリ 無記入:標準 05:100W以下 N:NPN B:有り (アブソ仕様) E:CE仕様 P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) PB:Profibus ピック&プレイス 05 コントローラ YK-XG SR1-X スカラロボット 3K/5K/10K (耐屈曲) XY-X ー TSモニタ ー ー 入出力 バッテリ ドライバ : 電源電圧/モータ容量 無記入:なし N:NPN B:有り (アブソ仕様) 105:100V/100W以下 L:LCD付き P:PNP 205:200V/100W以下 CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) EP:EtherNet/IP TS-X ※1. リード20mmの場合はブレーキ付き仕様(垂直仕様)を選択できません。 ※2. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※3. DINレールについてはP.454をご参照ください。 ー 直交ロボット ポジショナ※3 ー ー ストローク ー ケーブル長※2 ロボット本体 ー リード指定 ー ブレーキ※1 オプション 20:20mm 無記入:ブレーキなし 原点位置 なし:標準 3L:3.5m 150 ∼ 800 12:12mm BK:ブレーキ付き 変更 Z:反モータ側 (50mmピッチ) 5L:5m 6:6mm 10L:10m ー PHASER ー リニア単軸ロボット TSX ー FLIP-X ー 単軸ロボット ー 小型単軸ロボット ー TRANSERVO ー LCM100 C8 リニアコンベアモジュール 注文型式 アプリケーション ● 原点反モータ APPLICATION C8 ● ハイリード:リード20 MP 95 MR 110 ■ 適用コントローラ コントローラ SR1-X05 RCX221/222 RCX240/340 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 TS-X105 ポイントトレース/ リモートコマンド TS-X205 RDX-05-RBR1 パルス列 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 C8 203±3:モータ側原点時 (203):反モータ側原点時 約235(モーターケーブル長さ) (117):モータ側原点時 117±3:反モータ側原点時 31±1(注1) 有効ストローク 70 50 80 64 スライダー上面 (0.4) 75 39 (160) アース端子(M4) 188(ブレーキ付) 153 C-M5x0.8 深さ10 50 100 Ax100 B 50 単軸 (67) 2 10H7 板厚8 6.4 3.5 ※推奨板ナット:M3(ロ6*t1.6) L A B C D 本体質量(kg)注3 リード20 速度設定 最高速度注4 リード12 (mm/sec) リード6 速度設定 150 470 0 150 8 280 3.6 200 520 1 100 10 330 3 .9 250 570 1 150 10 380 4 .1 300 620 2 100 12 430 4 .4 350 400 670 720 2 3 150 100 12 14 480 530 4 .7 5 .0 1000 450 770 3 150 14 580 5 .3 ー 720 360 ー 500 820 4 100 16 630 5 .6 550 870 4 150 16 680 5 .9 600 920 5 100 18 730 6 .2 650 970 5 150 18 780 6 .4 950 95% 648 540 324 270 90% 75% 700 1020 6 100 20 830 6 .7 800 80% 468 234 65% D 750 1070 6 150 20 880 7 .0 700 70% 432 216 60% 800 1120 7 100 22 930 7.3 650 65% 360 180 50% 2 注1. 両端からのメカストッパによる停止位置です。 注2. モーターケーブルの最小曲げ半径はR50です。 注3. ブレーキなしの質量です。ブレーキ付はブレーキなしの本体質量表中の値 より0.3kg重くなります。 スカラ 有効ストローク φ10H7 板厚8 143 178(ブレーキ付) E部:T溝詳細図 直交 60 R 1.5 5 L+35(ブレーキ付) L (27) 注4. ストロークが600mmを超えるとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてプログラム上で速度を下げる調整をしてください。 適用コントローラ SR1-X u 472 TS-X u 446 RDX u 463 409 各種情報 E 4-M6x1.0 深さ10 2-φ5H7 深さ10 152±1(ブレーキ付)(注1) 238±3(ブレーキ付):モータ側原点時 (238):反モータ側原点時 (63.4) 60.5 φ10エアー継手 74 55 CONTROLLER INFORMATION 約200(モーターケーブル長さ) コントローラ (ノック間公差 ±0.02) 117±1(注1) APPLICATION アプリケーション LCM100 リニアコンベアモジュール C8L ● 原点反モータ 注文型式 C8L ー ー ー ー TSX ー ー ポジショナ※2 ー ー ー ケーブル長※1 ロボット本体 ー リード指定 ー ブレーキ オプション ストローク 20:20mm 無記入:ブレーキなし 原点位置 なし:標準 3L:3.5m 150 ∼ 1050 10:10mm BK:ブレーキ付き 変更 Z:反モータ側 (50mmピッチ) 5L:5m 5:5mm 10L:10m TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット 3K/5K/10K (耐屈曲) SR1-X 05 コントローラ RDX PHASER リニア単軸ロボット ■ 基本仕様 ー ー TSモニタ ー ー 入出力 バッテリ ドライバ : 電源電圧/モータ容量 無記入:なし N:NPN B:有り (アブソ仕様) 105:100V/100W以下 L:LCD付き P:PNP 205:200V/100W以下 CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) EP:EtherNet/IP TS-X ※1. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※2. DINレールについてはP.454をご参照ください。 ー ー ー ー ー ドライバ : モータ容量 ー CE対応 ー 入出力 バッテリ 無記入:標準 05:100W以下 N:NPN B:有り (アブソ仕様) E:CE仕様 P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) PB:Profibus 05 ー ー RBR1 ロボットドライバ ー ドライバ : モータ容量 ー 05:100W以下 回生装置 ■ 許容オーバーハング量※ MY B A C B C C A MR 壁面取付使用時 (単位:mm) 垂直使用時 (単位:mm) A B C A C 5kg 147 100 220 2kg 255 260 10kg 53 32 97 20 4kg 111 115 15kg 2kg 300 302 17 10 39 20 20kg 4kg 131 133 0 0 0 10kg 6kg 87 41 197 75 77 10 20kg 8kg 10 4 37 47 49 5kg 113 114 30kg 0 0 0 10 40kg 10kg 0 0 0 37 38 20kg 15kg 24 9 152 12 12 5 16kg 30kg 9 9 0 0 0 40kg 0 0 0 5 50kg 0 0 0 MP (単位:N・m) MY 70 リード MP 95 MR 110 ■ 適用コントローラ コントローラ リード リード リード リード リード リード YP-X ピック&プレイス 水平使用時 (単位:mm) A B C 5kg 259 122 179 10kg 149 55 89 15kg 100 33 56 20 20kg 95 22 41 10kg 251 61 130 20kg 127 25 55 30kg 90 14 31 10 40kg 69 8 18 20kg 256 29 76 30kg 188 16 43 40kg 96 10 28 5 50kg 33 6 18 リード YK-XG スカラロボット ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロークが700mmを超えるとき、動作領域によってはボールネ ジの共振が発生する場合があります(危険速度)。その時は図面下部 の表に示す最高速度を目安としてプログラム上で速度を下げる調整 をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※4. 必要吸引量は使用状態・使用環境で異なります。 ■ 静的許容モーメント A リード XY-X 直交ロボット モーター出力 AC(W) 100 1 繰り返し位置決め精度※( ±0.01 mm) 減速機構 ボールネジ(C7級) ボールネジリード (mm) 20 10 5 ※2 最高速度 (mm/sec) 1000 600 300 水平使用時 20 40 50 最大可搬質量 (kg) 垂直使用時 4 8 16 定格推力(N) 84 169 339 ストローク(mm) 150 ∼ 1050(50ピッチ) 水平使用時 ストローク+325 全長 (mm) 垂直使用時 ストローク+360 本体断面最大外形(mm) W80×H75 ケーブル長(m) 標準:3.5 / オプション:5,10 クリーン度 CLASS 10※3 吸引量 (Nℓ/min)エアー 30 ∼ 90※4 SR1-X05 RCX221/222 RCX240/340 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 TS-X105 ポイントトレース/ リモートコマンド TS-X205 RDX-05-RBR1 パルス列 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 C8L 約235(モーターケーブル長さ) (112):モータ側原点時 112±3:反モータ側原点時 27±1(注1) 有効ストローク 70 50 80 64 コントローラ 163±1(ブレーキ付)(注1) 248±3(ブレーキ付):モータ側原点時 (248):反モータ側原点時 約200(モーターケーブル長さ) (27) アース端子(M4) 単軸 5 L+35(ブレーキ付) L (160) 198(ブレーキ付) 163 C-M5x0.8 深さ10 50 100 Ax100 50 B (62) 2 10H7 板厚8 6.4 3.5 直交 60 R 1.5 4-M6x1.0 深さ10 2-φ5H7 深さ10 (63.4) 60.5 (0.4) 39 75 スライダー上面 φ10エアー継手 74 55 E 各種情報 CONTROLLER INFORMATION (ノック間公差 ±0.02) クリーン CLEAN 213±3:モータ側原点時 (213):反モータ側原点時 128±1(注1) ※推奨板ナット:M3(ロ6*t1.6) スカラ 有効ストローク L A B C D 本体質量(kg)注3 リード20 速度設定 最高速度注4 リード10 (mm/sec) リード5 速度設定 150 475 0 150 8 280 3 .9 φ10H7 板厚8 153 188(ブレーキ付) E部:T溝詳細図 200 525 1 100 10 330 4.2 250 575 1 150 10 380 4 .5 300 625 2 100 12 430 4.8 350 675 2 150 12 480 5.1 400 450 725 775 3 3 100 150 14 14 530 580 5.4 5.7 1000 ー 600 300 ー 500 825 4 100 16 630 6.0 550 875 4 150 16 680 6 .4 600 925 5 100 18 730 6 .7 650 700 750 975 1025 1075 5 6 6 150 100 150 18 20 20 780 830 880 7 .0 7 .3 7 .6 900 90% 510 450 255 225 85% 75% 2 D 800 1125 7 100 22 930 7 .9 800 80% 390 195 65% 850 1175 7 150 22 980 8 .2 700 70% 360 180 60% 900 1225 8 100 24 1030 8 .5 650 65% 330 165 55% 950 1275 8 150 24 1080 8.8 600 60% 300 150 50% 1000 1325 9 100 26 1130 9 .2 550 55% 270 135 45% 1050 1375 9 150 26 1180 9.5 500 50% 240 120 40% 注1. 両端からのメカストッパによる 停止位置です。 注2. モーターケーブルの最小曲げ半 径はR50です。 注3. ブレーキなしの質量です。 ブレー キ付はブレーキなしの本体質量表 中の値より0.3kg重くなります。 注4. ストロークが700mmを超えるとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてプログラム上で速度を下げる調整をしてください。 410 適用コントローラ SR1-X u 472 TS-X u 446 RDX u 463 05 ー RBR1 ロボットドライバ ー ドライバ : モータ容量 ー 05:100W以下 回生装置 ■ 許容オーバーハング量※ モーター出力 AC(W) 100 1 繰り返し位置決め精度※( ±0.01 mm) 減速機構 ボールネジ(C7級) ボールネジリード(mm) 20 10 5 2 最高速度※( mm/sec) 1000 600 300 最大可搬質量 水平使用時 30 60 80 ( ) MY MP (単位:N・m) MY 128 リード MP 163 MR 143 ■ 適用コントローラ リード コントローラ SR1-X05 RCX221/222 RCX240/340 リード リード ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロークが650mmを超えるとき、動作領域によってはボールネ ジの共振が発生する場合があります(危険速度)。その時は図面下部 の表に示す最高速度を目安としてプログラム上で速度を下げる調整 をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※4. 必要吸引量は使用状態・使用環境で異なります。 MR C 水平使用時 (単位:mm) 壁面取付使用時 (単位:mm) A B C A B C 10kg 687 274 200 10kg 163 225 617 20kg 401 125 20kg 92 56 76 302 20 30kg 338 76 57 20 30kg 20 27 182 20kg 622 137 111 20kg 74 90 517 40kg 472 40kg 57 47 8 11 196 10 60kg 375 ー ー 30 25 10 60kg ー 20kg 1087 148 127 20kg 89 104 974 40kg 844 40kg 63 54 15 18 505 60kg 707 60kg ー ー ー 34 29 5 5 80kg 594 80kg ー ー ー 20 17 リード 84 169 339 150 ∼ 1050(50ピッチ) ストローク+389 W80×H75 標準:3.5 / オプション:5,10 CLASS 10※3 30 ∼ 90※4 B A C リード kg 定格推力(N) ストローク(mm) 全長(mm) 本体断面最大外形(mm) ケーブル長(m) クリーン度 吸引量(Nℓ/min)エアー ■ 静的許容モーメント A B クリーン ー CLEAN RDX YP-X ー ピック&プレイス ー YK-XG ■ 基本仕様 ー ー ドライバ : モータ容量 ー CE対応 ー 入出力 バッテリ 無記入:標準 05:100W以下 N:NPN B:有り (アブソ仕様) E:CE仕様 P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) PB:Profibus スカラロボット 05 コントローラ XY-X SR1-X 直交ロボット 3K/5K/10K (耐屈曲) PHASER ー TSモニタ ー ー 入出力 バッテリ ドライバ : 電源電圧/モータ容量 無記入:なし N:NPN B:有り (アブソ仕様) 105:100V/100W以下 L:LCD付き P:PNP 205:200V/100W以下 CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) EP:EtherNet/IP TS-X ※1. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も 可能です。詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※2. DINレールについてはP.454をご参照ください。 ー リニア単軸ロボット ポジショナ※2 ー リード指定 ー ー ー ケーブル長※1 オプション ストローク 20:20mm 原点位置 なし:標準 150 ∼ 1050 3L:3.5m 10:10mm 変更 Z:反モータ側 (50mmピッチ) 5L:5m 5:5mm 10L:10m ー FLIP-X ー 単軸ロボット TSX ー 小型単軸ロボット ー TRANSERVO ー LCM100 ロボット本体 ー リニアコンベアモジュール C8LH アプリケーション 注文型式 APPLICATION C8LH ● 原点反モータ 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 TS-X105 ポイントトレース/ リモートコマンド TS-X205 RDX-05-RBR1 パルス列 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 C8LH 約235(モーターケーブル長さ) (144):モータ側原点時 144±3:反モータ側原点時 44±1(注1) 有効ストローク 100 80 50 (注1) 80 64 8-M6x1.0 深さ10 2-φ5H7 深さ10 スライダー上面 (0.4) 75 100 Ax100 C-M5x0.8 深さ10 100 B (69) 2 10H7 板厚8 6.4 3.5 ※推奨板ナット:M3(ロ6*t1.6) L A B C D 本体質量(kg) リード20 注3 速度設定 最高速度 リード10 (mm/sec) リード5 速度設定 150 539 1 100 8 330 4.7 200 589 1 150 8 380 5 .0 250 639 2 100 10 430 5 .3 300 689 2 150 10 480 5 .6 350 739 3 100 12 530 5 .9 400 789 3 150 12 580 6 .2 1000 450 839 4 100 14 630 6 .6 ー 600 300 ー 500 889 4 150 14 680 6 .9 550 939 5 100 16 730 7 .2 600 650 700 989 1039 1089 5 6 6 150 100 150 16 18 18 780 830 880 7 .5 7 .8 8 .1 900 90% 510 450 255 225 85% 75% 2 D 750 1139 7 100 20 930 8 .4 800 80% 390 195 65% 800 1189 7 150 20 980 8 .7 700 70% 360 180 60% 850 1239 8 100 22 1030 9 .0 650 65% 330 165 55% 900 1289 8 150 22 1080 9 .3 600 60% 300 150 50% 950 1339 9 100 24 1130 9 .7 550 55% 270 135 45% 1000 1389 9 150 24 1180 10.0 500 50% 240 120 40% 1050 1439 10 100 26 1230 10.3 450 45% 210 105 35% 注1. 両端からのメカストッパによる停 止位置です。 注2. モーターケーブルの最小曲げ半径 はR50です。 スカラ 有効ストローク φ10H7 板厚8 160 E部:T溝詳細図 直交 60 R 1.5 170 単軸 アース端子(M4) 5 L (190) 注3. ストロークが650mmを超えるとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてプログラム上で速度を下げる調整をしてください。 適用コントローラ SR1-X u 472 TS-X u 446 RDX u 463 411 各種情報 39 (27) (63.4) 60.5 φ10エアー継手 74 55 E コントローラ CONTROLLER INFORMATION (ノック間公差 ±0.02) 245±3:モータ側原点時 (245):反モータ側原点時 145±1(注1) APPLICATION アプリケーション LCM100 リニアコンベアモジュール C10 ● 原点反モータ:リード20・10 注文型式 C10 ー ー ー ー TSX ー ー ポジショナ ー ー ストローク ー ケーブル長※2 ロボット本体 ー リード指定 ー ブレーキ オプション 無記入:ブレーキなし 原点位置 なし:標準 20:20mm 3L:3.5m 150 ∼ 1050 変更 10:10mm BK:ブレーキ付き Z:反モータ側※1 (50mmピッチ) 5L:5m 5:5mm 10L:10m TS-X TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット PHASER リニア単軸ロボット 3K/5K/10K (耐屈曲) SR1-X 05 コントローラ RDX ※1. リード5mm仕様の場合は、原点を反モータ側に変更することはできません。 ※2. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※3. DINレールについてはP.454をご参照ください。 ■ 基本仕様 ー ー ー ー ー 05 ー ー RBR1 ロボットドライバ ー ドライバ : モータ容量 ー 05:100W以下 回生装置 ■ 静的許容モーメント A MY (単位:mm) B 496 218 78 230 80 30 234 82 31 451 168 27 170 29 0 170 29 0 C 垂直使用時 1826 1kg 1002 2kg 497 20 4kg 1036 4kg 506 8kg 311 10 10kg 2716 10kg 1206 15kg 711 5 20kg リード 510 5kg 242 10kg 107 20 20kg 164 10kg 66 20kg 42 10 30kg 68 10kg 28 20kg 17 5 30kg (単位:mm) リード 530 247 106 156 62 38 63 25 16 C A リード C リード リード B リード リード MR MP (単位:mm) A C 2461 2492 1213 1244 585 617 627 658 280 312 210 242 213 244 119 151 72 104 MP 119 MR 105 ■ 適用コントローラ コントローラ 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 ※ TS-X105 ポイントトレース/ ※ リモートコマンド TS-X205 RDX-05-RBR1 パルス列 SR1-X05※ RCX221/222 RCX240/340 ※ 垂直使用時で移動ストロークが 700mm以上の場合は回生装置が必要 になります。 (118):モータ側原点時 118±3:反モータ側原点時 有効ストローク 33±1(注1) 78 コントローラ 110±1(ブレーキ付時)(注1) 104 98 88 68 各種情報 4-M5x0.8 ネジ深さ12 195±3(ブレーキ付時):モータ側原点時 (195):反モータ側原点時 (約250) +0.012 2-φ5H7 0 深さ10 69.8 66.5 CONTROLLER INFORMATION (ノック間公差 ±0.02) クリーン CLEAN 165±3:モータ側原点時 (165):反モータ側原点時 (33) 80±1(注1) 160 70 φ12エアー継手 40 約250(モータケーブル長さ) 単軸 17.5 YP-X ピック&プレイス ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 (単位:N・m) MY 119 C10 85 84 47.5 YK-XG スカラロボット 5kg 1875 10kg 1079 20 20kg 628 15kg 765 30kg 425 10 40kg 350 30kg 960 50kg 565 5 60kg 470 C 壁面取付使用時 A リード A リード XY-X 直交ロボット 水平使用時 B A C B ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロークが750mmを超えるとき、動作領域によってはボールネ ジの共振が発生する場合があります(危険速度)。その時は図面下部 の表に示す最高速度を目安としてプログラム上で速度を下げる調整 をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※4. 必要吸引量は使用状態・使用環境で異なります。 ー ー バッテリ ドライバ : モータ容量 ー CE対応 ー 回生装置 ー 入出力 無記入:標準 無記入:なし N:NPN 05:100W以下 B:有り (アブソ仕様) E:CE仕様 R:RG1付き P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) PB:Profibus ■ 許容オーバーハング量※ モーター出力 AC(W) 100 1 繰り返し位置決め精度※( ±0.01 mm) 減速機構 ボールネジ(C7級) ボールネジリード(mm) 20 10 5 ※2 最高速度 (mm/sec) 1000 500 250 水平使用時 20 40 60 最大可搬質量 (kg) 垂直使用時 4 10 20 定格推力(N) 84 169 339 ストローク(mm) 150 ∼ 1050(50ピッチ) 水平使用時 ストローク+283 全長(mm) 垂直使用時 ストローク+313 本体断面最大外形(mm) W104×H85 ケーブル長(m) 標準:3.5 オプション:5,10 クリーン度 CLASS10※3 吸引量(Nℓ/min)エアー 30 ∼ 90※4 ー ー 回生装置 ー TSモニタ ー ー バッテリ 入出力 ドライバ : 電源電圧/モータ容量 無記入:なし 無記入:なし N:NPN B:有り (アブソ仕様) 105:100V/100W以下 R:RGT付き L:LCD付き P:PNP 205:200V/100W以下 CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) EP:EtherNet/IP ※3 30(ブレーキ付) 33 L アース端子(2ヶ所 対面同位置) 165 Mx200 200 A 80 直交 スカラ N-M5x0.8ネジ 深さ10 195(ブレーキ付時) 有効ストローク L A M N 本体質量(kg)注3 リード20 最高速度注4 リード10 (mm/sec)リード5 速度設定 150 433 200 0 4 4.4 200 483 50 1 6 5.0 250 533 100 1 6 5.5 300 583 150 1 6 6 .1 350 633 200 1 6 6.7 400 450 683 733 50 100 2 2 8 8 7.3 7.8 1000 500 250 ー 500 783 150 2 8 8.4 550 833 200 2 8 9.0 600 883 50 3 10 9 .6 650 933 100 3 10 10.1 700 983 150 3 10 10.7 750 800 850 900 950 1000 1050 注1. 両端からのメカストッパ位置です。 注2. モータケーブルの最小曲げ半径はR50です。 1033 1083 1133 1183 1233 1283 1333 注3. ブレーキなしの質量です。ブレーキ付はブレーキな 200 50 100 150 200 50 100 しの本体質量表中の値より0.4kg重くなります。 3 4 4 4 4 5 5 10 12 12 12 12 14 14 11.3 11.9 12.4 13.0 13.6 14.2 14.7 950 950 750 750 600 600 500 475 475 375 375 300 300 250 237 237 187 187 150 150 125 95% 95% 75% 75% 60% 60% 50% 注4. ストロークが750mmを超えるとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてプログラム上で速度を下げる調整をしてください。 412 適用コントローラ SR1-X u 472 TS-X u 446 RDX u 463 ー RBR1 回生装置 ■ 静的許容モーメント A MY B A C B C MR リード (単位:mm) 垂直使用時 (単位:mm) B C A C 1kg 600 600 968 1553 2kg 1200 1200 264 748 97 633 20 4kg 1141 885 リード リード リード 4kg 1216 180 658 8kg 621 49 363 16 296 10 10kg 503 10kg 574 103 1033 15kg 370 13 433 0 242 5 20kg 268 リード リード リード ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロークが750mmを越えるとき、動作領域によってはボールネ ジの共振が発生する場合があります(危険速度)。 その時は図面下部の表に示す最高速度を目安としてプログラム上で 速度を下げる調整をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※4. 必要吸引量は使用状態・使用環境で異なります。 C リード リード 水平使用時 (単位:mm) 壁面取付使用時 A B C A 5kg 2127 1384 968 5kg 1047 15kg 1177 459 425 15kg 387 20 30kg 1247 242 291 20 30kg 206 20kg 1120 349 353 20kg 299 40kg 857 179 215 40kg 127 10 55kg 932 138 182 10 55kg 79 50kg 2017 250 335 50kg 233 60kg 1477 134 192 60kg 75 5 80kg 1452 106 157 5 80kg 35 A 943 482 390 445 287 208 ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 クリーン 05 ー ロボットドライバ ー ドライバ : モータ容量 ー 05:100W以下 CLEAN ー バッテリ ドライバ : モータ容量 ー CE対応 ー 回生装置 ー 入出力 無記入:標準 無記入:なし N:NPN 05:100W以下 B:有り (アブソ仕様) E:CE仕様 R:RG1付き P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) PB:Profibus ■ 許容オーバーハング量※ モーター出力 AC(W) 100 1 繰り返し位置決め精度※( ±0.01 mm) 減速機構 ボールネジ(C7級) ボールネジリード(mm) 20 10 5 ※2 最高速度 (mm/sec) 1000 500 250 水平使用時 30 55 80 最大可搬質量 (kg) 垂直使用時 4 10 20 定格推力(N) 84 169 339 ストローク(mm) 150 ∼ 1050(50ピッチ) 水平使用時 ストローク+285 全長(mm) 垂直使用時 ストローク+315 本体断面最大外形(mm) W136×H96 ケーブル長(m) 標準:3.5 / オプション:5,10 クリーン度 CLASS 10※3 吸引量(Nℓ/min)エアー 30 ∼ 90※4 ー YP-X ー ピック&プレイス ■ 基本仕様 RDX ー YK-XG コントローラ ー スカラロボット 05 XY-X SR1-X 直交ロボット 3K/5K/10K ※1. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※2. DINレールについてはP.454をご参照ください。 ー ー 回生装置 ー TSモニタ ー ー バッテリ 入出力 ドライバ : 電源電圧/モータ容量 無記入:なし 無記入:なし N:NPN B:有り (アブソ仕様) 105:100V/100W以下 R:RGT付き L:LCD付き P:PNP 205:200V/100W以下 CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) EP:EtherNet/IP TS-X (耐屈曲) ー PHASER ポジショナ ー ー ストローク ー ケーブル長※1 ロボット本体 ー リード指定 ー ブレーキ オプション 20:20mm 無記入:ブレーキなし 原点位置 なし:標準 3L:3.5m 150 ∼ 1050 10:10mm BK:ブレーキ付き 変更 Z:反モータ側 (50mmピッチ) 5L:5m 5:5mm 10L:10m ー リニア単軸ロボット ー ※2 FLIP-X TSX ー 単軸ロボット ー 小型単軸ロボット ー TRANSERVO ー LCM100 ー リニアコンベアモジュール C14 アプリケーション 注文型式 APPLICATION C14 ● 原点反モータ MP (単位:N・m) MY 232 MP 233 MR 204 ■ 適用コントローラ コントローラ 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 ※ TS-X105 ポイントトレース/ ※ リモートコマンド TS-X205 RDX-05-RBR1 パルス列 SR1-X05※ RCX221/222 RCX240/340 ※ 垂直使用時で移動ストロークが 700mm以上の場合は回生装置が必要 になります。 C14 3.5 1.5 約250(モーターケーブル長さ) 165±3:モータ側原点時 (165):反モータ側原点時 1.5 (33) 80±1(注1) +0.012 2-φ6H7( 0 )深さ10 4-M6x1.0ネジ深さ12 35±1(注1) 5.5 136 110 106 72 110±1(ブレーキ付)(注1) 195±3(ブレーキ付):モータ側原点時 (195):反モータ側原点時 約250 80.5 77.5 96 95 22.5 15 56 18 アース端子(2ヶ所対面同位置) 165 100 L Mx200 N-M6x1.0ネジ深さ10 単軸 30(ブレーキ付) A (70) 100 直交 スカラ 195(ブレーキ付) 有効ストローク L A M N 本体質量(kg)注3 リード20 最高速度注4 リード10 (mm/sec)リード5 速度設定 150 435 200 0 6 9.2 200 485 50 1 8 9.9 250 535 100 1 8 10.5 300 585 150 1 8 11.2 350 635 200 1 8 11.7 400 450 685 735 50 100 2 2 10 10 12.4 13.0 1000 500 250 500 785 150 2 10 13.7 ー 550 835 200 2 10 14.3 600 885 50 3 12 15.0 650 935 100 3 12 15.5 700 985 150 3 12 16.2 750 800 850 900 950 1000 1050 注1. 両端からのメカストッパ位置です。 注2. モータケーブルの最小曲げ半径はR50です。 1035 1085 1135 1185 1235 1285 1335 注3. ブレーキなしの質量です。ブレーキ付はブレーキな 200 50 100 150 200 50 100 しの本体質量表中の値より0.4kg重くなります。 3 4 4 4 4 5 5 12 14 14 14 14 16 16 16.8 17.5 18.1 18.8 19.3 20.0 20.6 950 950 750 750 600 600 500 475 475 375 375 300 300 250 237 237 187 187 150 150 125 95% 95% 75% 75% 60% 60% 50% 注4. ストロークが750mmを越えるとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてプログラム上で速度を下げる調整をしてください。 適用コントローラ SR1-X u 472 TS-X u 446 RDX u 463 413 各種情報 Z コントローラ Z CONTROLLER INFORMATION 84 (ノック間±0.02) 8.3 φ12エアー継手 (120):モータ側原点時 120±3:反モータ側原点時 有効ストローク 160 70 40 APPLICATION アプリケーション LCM100 リニアコンベアモジュール C14H ● 原点反モータ:リード20・10 注文型式 C14H ー ー ー ー TSX ー ー ポジショナ ー ストローク ー ケーブル長※2 ロボット本体 ー リード指定 ー ブレーキ ー オプション なし:標準 20:20mm 無記入:ブレーキなし 原点位置 3L:3.5m 150 ∼ 1050 10:10mm BK:ブレーキ付き 変更 Z:反モータ側※1 (50mmピッチ) 5L:5m 5:5mm 10L:10m TS-X TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット PHASER リニア単軸ロボット 3K/5K/10K (耐屈曲) SR1-X 10 コントローラ RDX ※1. リード5mm仕様の場合は、原点を反モータ側に変更することはできません。 ※2. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※3. DINレールについてはP.454をご参照ください。 ■ 基本仕様 ー ー ー ー ー ー ー バッテリ ドライバ : モータ容量 ー CE対応 ー 回生装置 ー 入出力 無記入:標準 無記入:なし N:NPN 10:200W B:有り (アブソ仕様) E:CE仕様 R:RG1付き P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) PB:Profibus 10 ー ー RBR1 ロボットドライバ ー ドライバ : モータ容量 ー 10:200W以下 回生装置 ■ 許容オーバーハング量※ ■ 静的許容モーメント A MY A C B B C 垂直使用時 リード リード 20 リード リード リード 10 リード リード リード 5 4kg 6kg 8kg 10kg 15kg 20kg 20kg 25kg 30kg MR A C 2400 1687 1287 1347 887 657 747 663 491 2008 1358 1033 1088 718 538 608 484 396 (単位:N・m) MY 293 MP 294 MR 258 ■ 適用コントローラ コントローラ ※ SR1-X10 RCX221/222 RCX240/340 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 TS-X110※ ポイントトレース/ リモートコマンド TS-X210※ RDX-10-RBR1 パルス列 ※ 垂直使用時は回生装置が必要になります。 約250(モーターケーブル長さ) 1.5 (33) クリーン 204±3:モータ側原点時 (204):反モータ側原点時 190 104±1(注1) 100 70 (145):モータ側原点時 145±3:反モータ側原点時 45±1(注1) 有効ストローク +0.012 2-φ6H7( 0 )深さ10 4-M6x1.0ネジ深さ12 コントローラ Z 136 110 106 72 134±1(ブレーキ付)(注1) 234±3(ブレーキ付):モータ側原点時 (234):反モータ側原点時 (約250) Z 80.5 77.5 各種情報 15 22.5 CONTROLLER INFORMATION 84 (ノック間±0.02) 8.3 φ12エアー継手 5.5 CLEAN 3.5 1.5 96 95 YP-X ピック&プレイス ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 MP (単位:mm) C14H 56 YK-XG スカラロボット ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロークが750mmを越えるとき、動作領域によってはボールネ ジの共振が発生する場合があります(危険速度)。 その時は図面下部の表に示す最高速度を目安としてプログラム上で 速度を下げる調整をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※4. 必要吸引量は使用状態・使用環境で異なります。 C A 水平使用時 (単位:mm) 壁面取付使用時 (単位:mm) A B C A B C 10kg 2247 1675 958 10kg 987 1210 1678 20kg 1397 855 528 20kg 497 548 958 20 40kg 1037 445 318 20 40kg 247 217 598 30kg 1937 583 478 30kg 402 328 1238 50kg 1637 364 323 50kg 227 152 878 10 80kg 1717 242 235 10 80kg 119 74 678 60kg 2443 311 313 60kg 197 108 1308 80kg 2193 242 250 80kg 127 53 1008 5 100kg 2000 202 213 5 100kg 85 20 788 リード XY-X 直交ロボット モーター出力 AC(W) 200 1 繰り返し位置決め精度※( ±0.01 mm) 減速機構 ボールネジ(C7級) ボールネジリード(mm) 20 10 5 ※2 最高速度 (mm/sec) 1000 500 250 水平使用時 40 80 100 最大可搬質量 (kg) 垂直使用時 8 20 30 定格推力(N) 170 341 683 ストローク(mm) 150 ∼ 1050(50ピッチ) 水平使用時 ストローク+349 全長(mm) 垂直使用時 ストローク+379 本体断面最大外形(mm) W136×H96 ケーブル長(m) 標準:3.5 / オプション:5,10 クリーン度 CLASS 10※3 吸引量 (Nℓ/min)エアー 30 ∼ 90※4 ー ー 回生装置 ー TSモニタ ー ー バッテリ 入出力 ドライバ : 電源電圧/モータ容量 無記入:なし 無記入:なし N:NPN B:有り (アブソ仕様) 110:100V/200W R:RGT付き L:LCD付き P:PNP 210:200V/200W CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) EP:EtherNet/IP ※3 単軸 30(ブレーキ付) アース端子(2ヶ所対面同位置) 18 179 L Mx200 N-M6x1.0ネジ深さ10 100 A (120) 100 直交 スカラ 209(ブレーキ付) 有効ストローク L A M N 本体質量(kg)注3 リード20 最高速度※4 リード10 (mm/sec)リード5 速度設定 150 499 200 0 6 10.7 200 549 50 1 8 11.4 250 599 100 1 8 12.0 300 649 150 1 8 12.7 350 699 200 1 8 13.2 400 450 749 799 50 100 2 2 10 10 13.9 14.5 1000 500 250 ー 500 849 150 2 10 15.2 550 899 200 2 10 15.8 600 949 50 3 12 16.5 650 999 100 3 12 17.0 700 750 800 850 900 950 1000 1050 注1. 両端からのメカストッパ位置です。 注2. モータケーブルの最小曲げ半径はR50です。 1049 1099 1149 1199 1249 1299 1349 1399 注3. ブレーキなしの質量です。ブレーキ付はブレーキな 150 200 50 100 150 200 50 100 しの本体質量表中の値より0.4kg重くなります。 3 3 4 4 4 4 5 5 12 12 14 14 14 14 16 16 17.7 18.3 19.0 19.6 20.3 20.8 21.5 22.1 950 950 750 750 600 600 500 475 475 375 375 300 300 250 237 237 187 187 150 150 125 95% 95% 75% 75% 60% 60% 50% 注4. ストロークが750mmを越えるとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてプログラム上で速度を下げる調整をしてください。 414 適用コントローラ SR1-X u 472 TS-X u 446 RDX u 463 ■ 静的許容モーメント A MY B A C B C A C 60kg 2443 100kg 2000 10 120kg 1841 418 237 192 15kg 1728 1728 336 2443 25kg 1013 1013 155 2000 109 1841 10 35kg 707 707 525 271 207 リード リード リード 60kg 580 100kg 330 268 10 120kg MR ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロークが950mmを越えるとき、動作領域によってはボールネ ジの共振が発生する場合があります(危険速度)。 その時は図面下部の表に示す最高速度を目安としてプログラム上で 速度を下げる調整をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※4. 必要吸引量は使用状態・使用環境で異なります。 MP (単位:N・m) MY 1032 リード (単位:mm) 垂直使用時 (単位:mm) B C A C 5kg 3000 3000 789 2576 10kg 2443 2443 426 1808 221 1380 20 15kg 1633 1633 リード (単位:mm) 壁面取付使用時 B C A 30kg 1017 871 1040 50kg 583 508 615 303 377 20 80kg 338 リード 水平使用時 A 30kg 2660 50kg 1911 20 80kg 1541 クリーン ー CLEAN 20 ー ロボットドライバ ー ドライバ : モータ容量 ー 回生装置 20:400W以下 RBR1(水平) RBR2(垂直) ■ 許容オーバーハング量※ モーター出力 AC(W) 400 1 繰り返し位置決め精度※( ±0.01 mm) 減速機構 ボールネジ(C7級) ボールネジリード(mm) 20 10 ※2 最高速度 (mm/sec) 1000 500 水平使用時 80 120 最大可搬質量 (kg) 垂直使用時 15 35 定格推力(N) 339 678 ストローク(mm) 200 ∼ 1250(50ピッチ) 水平使用時 ストローク+395 全長(mm) 垂直使用時 ストローク+425 本体断面最大外形(mm) W168×H114 ケーブル長(m) 標準:3.5 / オプション:5,10 クリーン度 CLASS 10※3 吸引量(Nℓ/min)エアー 30 ∼ 90※4 ー YP-X ー ピック&プレイス ー YK-XG ー ー バッテリ ドライバ : モータ容量 ー CE対応 ー 回生装置 ー 入出力 無記入:標準 無記入:なし N:NPN 20:400 ∼ 600W B:有り (アブソ仕様) E:CE仕様 R:RG1付き P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) PB:Profibus スカラロボット 20 コントローラ XY-X SR1-X ■ 基本仕様 ー 直交ロボット 3K/5K/10K (耐屈曲) ※1. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※2. DINレールについてはP.454をご参照ください。 ー ー 回生装置 ー TSモニタ ー ー バッテリ 入出力 ドライバ : 電源電圧/モータ容量 無記入:なし 無記入:なし N:NPN B:有り (アブソ仕様) 220:200V/400 ∼ 600W R:RGT付き L:LCD付き P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) EP:EtherNet/IP TS-X RDX ー PHASER ポジショナ ー リニア単軸ロボット ー ー ストローク ー ケーブル長※1 ロボット本体 ー リード指定 ー ブレーキ オプション 20:20mm 無記入:ブレーキなし 原点位置 なし:標準 3L:3.5m 200 ∼ 1250 10:10mm BK:ブレーキ付き 変更 Z:反モータ側 (50mmピッチ) 5L:5m 10L:10m 220 ※2 FLIP-X TSX ー 単軸ロボット ー 小型単軸ロボット ー TRANSERVO ー LCM100 ー リニアコンベアモジュール C17 アプリケーション 注文型式 APPLICATION C17 ● 原点反モータ MP 1034 MR 908 ■ 適用コントローラ コントローラ 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 ポイントトレース/ TS-X220※ リモートコマンド RDX-20-RBR1 パルス列(水平使用) RDX-20-RBR2 パルス列(垂直使用) SR1-X20※ RCX221/222 RCX240/340 ※ 垂直仕様の場合、最高速度が1000mm/sec を超えた速度で動かす場合は回生装置が必 要となります。 C17 242.5±3:モータ側原点時 (242.5):反モータ側原点時 約250(モーターケーブル長さ) (33) 3.7 2.5 1.5 127.5±1(注1) 50 70(ノック間±0.02) (152.5):モータ側原点時 152.5±3:反モータ側原点時 4-M6x1.0 ネジ深さ20 4-φ6H7(+00.012 )深さ10 4-M8x1.25 ネジ深さ20 37.5±1(注1) 121 (ノック間±0.02) Z (約250) 136 157.5±1(ブレーキ付)(注1) 272.5±3(ブレーキ付):モータ側原点時 (272.5):反モータ側原点時 220 95 92 55 51 28 20 114 113 Z アース端子(2ヶ所対面同位置) 243 200 N-M8x1.25 ネジ深さ18 単軸 18 30(ブレーキ付) L Mx200 A (102) 132 直交 スカラ 273(ブレーキ付) 有効ストローク L A M N 本体質量(kg)注3 リード20 最高速度注4 リード10 (mm/sec) 速度設定 200 595 50 1 8 15.0 250 645 100 1 8 16.0 300 695 150 1 8 17.0 350 745 200 1 8 17.9 400 795 50 2 10 18.9 450 845 100 2 10 19.8 500 895 150 2 10 20.8 550 945 200 2 10 21.7 1000 500 ー 600 995 50 3 12 22.7 650 700 750 800 850 900 950 1000 1050 1100 1150 1200 1250 注1. 両端からのメカストッパ位置 です。 1045 1095 1145 1195 1245 1295 1345 1395 1445 1495 1545 1595 1645 注2. モータケーブルの最小曲げ半 100 150 200 50 100 150 200 50 100 150 200 50 100 径はR50です。 3 3 3 4 4 4 4 5 5 5 5 6 6 注3. ブレーキなしの質量です。ブ レーキ付はブレーキなしの本体 12 12 12 14 14 14 14 16 16 16 16 18 18 質量表中の値より1.5kg重くな 23.6 24.6 25.5 26.5 27.4 28.4 29.3 30.3 31.2 32.2 33.1 34.1 35.0 ります。 800 800 700 700 600 600 500 400 400 350 350 300 300 250 80% 80% 70% 70% 60% 60% 50% 注4. ストロークが950mmを越えるとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてプログラム上で速度を下げる調整をしてください。 適用コントローラ SR1-X u 472 TS-X u 446 RDX u 463 415 各種情報 168 150 141 104 コントローラ CONTROLLER INFORMATION 5.5 8.6 φ12エアー継手 有効ストローク 94 APPLICATION アプリケーション LCM100 リニアコンベアモジュール C17L ● 原点反モータ ※ 受注生産ですので、納期は弊社営業までお問い合わせください。 注文型式 C17L 50 ー ー ロボット本体 ー リード指定 ー ー ー TSX ー ー ー ストローク ー ケーブル長※1 ブレーキ オプション 無記入:ブレーキなし 原点位置 なし:標準 3L:3.5m 1150 ∼ 2050 変更 Z:反モータ側 (100mmピッチ) 5L:5m 10L:10m BK:ブレーキ付き 220 ポジショナ TS-X TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット 3K/5K/10K (耐屈曲) SR1-X 20 コントローラ ※1. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※2. DINレールについてはP.454をご参照ください。 ※3. ポジショナ、コントローラ、ロボットドライバにより加減速が異なります。 PHASER リニア単軸ロボット ■ 基本仕様 RDX R ー ー ー ー ー R ー ー ー バッテリ ドライバ : モータ容量※3 ー CE対応 ー 回生装置 ー 入出力 無記入:標準 20:400 ∼ 600W R:RG1付き N:NPN B:有り (アブソ仕様) E:CE仕様 P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) PB:Profibus 20 ー ー ロボットドライバ ー ドライバ : モータ容量 20:400W以下 ※3 ー 回生装置 RBR1(水平) RBR2(垂直) ■ 許容オーバーハング量※ ■ 静的許容モーメント A MY A C B B C A C MR ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 YK-XG スカラロボット YP-X ピック&プレイス ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロークが1850mmを越えるとき、動作領域によってはボールネ ジの共振が発生する場合があります(危険速度)。 その時は図面下部の表に示す最高速度を目安としてプログラム上で 速度を下げる調整をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※4. 必要吸引量は使用状態・使用環境で異なります。 MP (単位:N・m) MY 1032 リード リード 水平使用時 (単位:mm) 壁面取付使用時 (単位:mm) 垂直使用時 (単位:mm) A B C A B C A C 10kg 4000 2687 3327 10kg 3436 2605 4000 2kg 1200 1200 30kg 3045 872 929 30kg 1169 790 3045 5kg 3000 3000 50 50kg 2602 509 714 50 50kg 666 427 2602 50 10kg 2579 2579 リード XY-X 直交ロボット モーター出力 AC(W) 600 1 繰り返し位置決め精度※( ±0.02 mm) 減速機構 ボールネジ(C10級) ボールネジリード(mm) 50 ※2 最高速度 (mm/sec) 1000 水平使用時 50 最大可搬質量 (kg) 垂直使用時 10 定格推力(N) 204 ストローク(mm) 1150 ∼ 2050(100ピッチ) 水平使用時 ストローク+485 全長 (mm) 垂直使用時 ストローク+515 本体断面最大外形(mm) W168×H114 ケーブル長(m) 標準:3.5 / オプション:5,10 クリーン度 CLASS 10※3 吸引量 (Nℓ/min)エアー 30 ∼ 90※4 ー ー 回生装置 ー TSモニタ ー ー バッテリ 入出力 ドライバ : 電源電圧/モータ容量※3 R:RGT付き 無記入:なし N:NPN B:有り (アブソ仕様) 220:200V/400 ∼ 600W L:LCD付き P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) EP:EtherNet/IP ※2 MP 1034 MR 908 ■ 適用コントローラ コントローラ 運転方法 SR1-X20-R RCX221/222 RCX240/340 プログラム ポイントトレース リモートコマンド オンライン命令 TS-X220-R ポイントトレース/ リモートコマンド RDX-20-RBR1(水平) パルス列 RDX-20-RBR2(垂直) C17L 約250(モーターケーブル長さ) クリーン (186) :モータ側原点時 186±7:反モータ側原点時 有効ストローク 94 70(ノック間±0.02) 4-M6x1.0 ネジ深さ20 +0.012 4-φ6H7( 0 )深さ10 4-M8x1.25 ネジ深さ20 50 66.5±2 (注1) コントローラ 168 150 141 104 各種情報 136 220 206.5±2(ブレーキ付)(注1) 329±7(ブレーキ付):モータ側原点時 (329):反モータ側原点時 (約250) 92 95 28 20 95 92 55 Z 51 CONTROLLER INFORMATION 121 (ノック間±0.02) φ12エアー継手 114 113 CLEAN (33) 299±7 :モータ側原点時 (299):反モータ側原点時 176.5±2(注1) 単軸 30(ブレーキ付) 18 アース端子(2ヶ所対面同位置) 299 Mx200 N-M8x1.25ネジ深さ18 200 2.5 A 136 5.5 8.6 直交 3.7 1.5 L スカラ 132 0.5 Z 329(ブレーキ付) 有効ストローク L A M N 本体質量(kg)注3 最高速度注4 リード50 (mm/sec)速度設定 1150 1635 200 5 16 39.1 1250 1735 100 6 18 41.2 1350 1835 200 6 18 43.2 1450 1935 100 7 20 45.2 1000 ー 1550 2035 200 7 20 47.3 1650 2135 100 8 22 49.3 1750 2235 200 8 22 51.3 1850 2335 100 9 24 53.4 900 90% 1950 2050 2435 2535 200 100 9 10 24 26 55.4 57.4 800 80% 注1. 両端からのメカストッパ位置です。 注2. モータケーブルの最小曲げ半径はR50です。 注3. ブレーキなしの質量です。ブレーキ付はブレーキなしの本体質量表中の値より1.5kg重くなります。 注4. ストロークが1850mmを越えるとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてプログラム上で速度を下げる調整をしてください。 416 適用コントローラ SR1-X u 472 TS-X u 446 RDX u 463 ■ 静的許容モーメント A MY A C B B C A C MR リード リード リード 水平使用時 (単位:mm) 壁面取付使用時 (単位:mm) 垂直使用時 (単位:mm) A B C A B C A C 50kg 2602 869 1145 50kg 1144 798 2602 15kg 2711 2711 80kg 2193 528 720 80kg 717 456 2193 20kg 2045 2045 20 120kg 1841 339 505 20 120kg 466 267 1841 20 25kg 1647 1647 20kg 2182 2182 30kg 1437 1437 10 45kg 939 939 リード ※ ガイド寿命10,000km時のスライダ上面センターより搬送重心までの距離です。 ※1. 片振りでの繰り返し位置決め精度。 ※2. ストロークが950mmを越えるとき、動作領域によってはボールネ ジの共振が発生する場合があります(危険速度)。 その時は図面下部の表に示す最高速度を目安としてプログラム上で 速度を下げる調整をしてください。 ※3. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※4. 必要吸引量は使用状態・使用環境で異なります。 クリーン ー CLEAN 20 ー ロボットドライバ ー ドライバ : モータ容量※4 ー 回生装置 20:400W以下 RBR1(水平) RBR2(垂直) ■ 許容オーバーハング量※ モーター出力 AC(W) 600 1 繰り返し位置決め精度※( ±0.01 mm) 減速機構 ボールネジ(C7級) ボールネジリード(mm) 20 10 ※2 最高速度 (mm/sec) 1000 500 水平使用時 ̶ 120 最大可搬質量 (kg) 垂直使用時 25 45 定格推力(N) 510 1020 ストローク(mm) 200 ∼ 1250(50ピッチ) 水平使用時 ストローク+441 全長(mm) 垂直使用時 ストローク+471 本体断面最大外形(mm) W202×H117 ケーブル長(m) 標準:3.5 / オプション:5,10 クリーン度 CLASS 10※3 吸引量(Nℓ/min)エアー 30 ∼ 90※4 ー YP-X ー ピック&プレイス ー YK-XG ー ー バッテリ ドライバ : モータ容量※4 ー CE対応 ー 回生装置 ー 入出力 無記入:標準 無記入:なし N:NPN 20:400 ∼ 600W B:有り (アブソ仕様) E:CE仕様 R:RG1付き P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) PB:Profibus スカラロボット 20 コントローラ XY-X SR1-X ■ 基本仕様 ー 直交ロボット 3K/5K/10K (耐屈曲) RDX ー ー 回生装置 ー TSモニタ ー ー バッテリ 入出力 ドライバ : 電源電圧/モータ容量※4 無記入:なし 無記入:なし N:NPN B:有り (アブソ仕様) 220:200V/400 ∼ 600W R:RGT付き L:LCD付き P:PNP CC:CC-Link N:なし DN:DeviceNet (インクリ仕様) EP:EtherNet/IP TS-X ※1. リード10mmはブレーキ付き仕様(垂直仕様)のみで選択できます。 ※2. 標準ロボットケーブルは固定用ケーブルです(3L/5L/10L)。耐屈曲ケーブルの選択も可能です。 詳細についてはP.518 ∼のロボットケーブル一覧をご覧ください。 ※3. DINレールについてはP.454をご参照ください。 ※4. ポジショナ、コントローラ、ロボットドライバにより加減速が異なります。 ー PHASER ポジショナ ー ー ストローク ー ケーブル長※2 ロボット本体 ー リード指定※1 ー ブレーキ オプション 無記入:ブレーキなし 原点位置 なし:標準 20:20mm 3L:3.5m 200 ∼ 1250 10:10mm BK:ブレーキ付き 変更 Z:反モータ側 (50mmピッチ) 5L:5m 10L:10m ー リニア単軸ロボット 220 ※3 FLIP-X TSX ー 単軸ロボット ー 小型単軸ロボット ー TRANSERVO ー LCM100 ー リニアコンベアモジュール C20 アプリケーション 注文型式 APPLICATION C20 ● 原点反モータ MP (単位:N・m) MY 1101 MP 1103 MR 968 ■ 適用コントローラ コントローラ 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 ポイントトレース/ TS-X220※ リモートコマンド RDX-20-RBR1 パルス列(水平使用) RDX-20-RBR2 パルス列(垂直使用) SR1-X20※ RCX221/222 RCX240/340 ※ 垂直仕様の場合、最高速度が1000mm/sec を超えた速度で動かす場合は回生装置が必 要になります。 C20 約250(モーターケーブル長さ) 3.7 1.5 281±3:モータ側原点時 (281):反モータ側原点時 (33) 5.5 8.6 2.5 有効ストローク 94 70(±0.02) 50 166±1(注1) (160):モータ側原点時 160±3:反モータ側原点時 45±1(注1) 121 (ノック間±0.02) Z 136 196±1(ブレーキ付)(注1) 311±3(ブレーキ付):モータ側原点時 (311):反モータ側原点時 (約250) 220 98 95 60 28 20 117 116 Z 29 アース端子(2ヶ所対面同位置) 281 200 単軸 30(ブレーキ付) L Mx200 N-M8x1.25ネジ深さ20 A (110) 162 直交 スカラ 311(ブレーキ付) 有効ストローク L A M N 本体質量(kg)注3 リード20 最高速度注4 リード10 (mm/sec) 速度設定 200 641 50 1 8 25.0 250 691 100 1 8 26.0 300 741 150 1 8 27.0 350 791 200 1 8 28.0 400 841 50 2 10 29.0 450 891 100 2 10 30.0 500 941 150 2 10 31.0 550 600 650 700 750 800 850 900 950 1000 1050 1100 1150 1200 1250 注1. 両端からのメカストッパ位置 です。 991 1041 1091 1141 1191 1241 1291 1341 1391 1441 1491 1541 1591 1641 1691 注2. モータケーブルの最小曲げ半 200 50 100 150 200 50 100 150 200 50 100 150 200 50 100 径はR50です。 2 3 3 3 3 4 4 4 4 5 5 5 5 6 6 注3. ブレーキなしの質量です。ブ レーキ付はブレーキなしの本体 10 12 12 12 12 14 14 14 14 16 16 16 16 18 18 質量表中の値より2.0kg重くな 32.0 33.0 34.0 35.0 36.0 37.0 38.0 39.0 40.0 41.0 42.0 43.0 44.0 45.0 46.0 ります。 1000 800 800 700 700 600 600 500 500 400 400 350 350 300 300 250 ー 80% 80% 70% 70% 60% 60% 50% 注4. ストロークが950mmを越えるとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてプログラム上で速度を下げる調整をしてください。 適用コントローラ SR1-X u 472 TS-X u 446 RDX u 463 417 各種情報 202 150 141 104 コントローラ CONTROLLER INFORMATION φ12 エアー継手 0.5 4-M6x1.0ネジ深さ20 4-M8x1.25ネジ深さ20 +0.012 4-φ6H7( 0 )深さ10 注文型式 SXYxC D ー ロボット本体 ー ケーブル ー 小型単軸ロボット ー ー ー ー 組合せ ー X軸ストローク ー Y軸ストローク ー ケーブル長 T1 15 ∼ 65cm 3L:3.5m 15 ∼ 105cm T3 5L:5m 10L:10m RCX222 ー 適用コントローラ ー ー RCX222 ー CE対応 無記入:標準 ー ※1. CE仕様の場合、NPNは選択できません。 ※2. マスターのみで対応可能です。 YC-Linkについての詳細はP.60をご覧ください。 ※3. 入出力選択1においてCCまたはDNまたはPBを選択した場合のみ、入出力選択2においてENを選択できます。 入出力選択1 ー 入出力選択2 無記入:なし N1:OP.DIO24/16 ※2 (NPN) P1:OP.DIO24/17 (PNP) EN:Ethernet※3 ■ 最大可搬質量 (kg) 軸構成※1 X軸 Y軸 C14H C14 モータ出力 AC(W) 100 ±0.01 駆動方式 ボールネジ(C7級) ボールネジ(C7級) ボールネジリード(減速比) (mm) 3 最高速度※( mm/sec) 動作範囲(mm) 20 20 1000 1000 150 ∼ 1050 ロボットケーブル長(m) XY2軸 20 17 15 13 11 9 150 ∼ 650 標準:3.5 オプション:5,10 吸引量 (Nℓ/min)エアー ■ 適用コントローラ 60※5 コントローラ RCX222 運転方法 プログラム/ポイントトレース/ リモートコマンド/オンライン命令 SXYxC 2軸 T1 ユーザ配管1(φ6青) Xストローク 5 5 注1 A M 5 M φ38 (吸引用配管) 2.5 コントローラ 82 190 (1) 82 (ノック間±0.02) Xストローク+345 L(Xストローク+478) 110 106 72 A部詳細図 各種情報 77.5 80.5 Mx200 100 K 200 N-M6x1.0 ネジ深さ10 212.5 (68) 75 322 スカラ 100 直交 308 78.5 101.5 116.5 39 アース端子(M4) 117.5 78 単軸 77.5 80.5 CONTROLLER INFORMATION 216 2.5 107 68 160 ユーザ配線・配管詳細図 84 4-M6x1.0 ネジ深さ12 2-φ6H7(+00.012)深さ10 1 クリーン CLEAN 110 MAX.950 YP-X ピック&プレイス 282±3 136 ユーザ配管1(φ6赤) 70 20 20 ユーザ配管1(φ6黒) 51 ユーザ配線Dサブコネクタ (1-24番使用可) 78 YK-XG スカラロボット ※1. フレームの加工(取付穴・タップ穴)は単軸ロボットとは異なりますのでご注意ください。 ※2. 片振りでの繰り返し位置決め精度。 ※3. X軸ストロークが850mm以上のとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。 その時は図面下部の表に示す最高速度を目安としてパラメータまたはプログラム上で速度を下げる調整をしてください。 ※4. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※5. 必要吸引量は使用状態・使用環境で異なります。 153 XY-X 直交ロボット CLASS 10※4 クリーン度 5 170±3 PHASER リニア単軸ロボット 200 ±0.01 2 繰り返し位置決め精度※( mm) Yストローク(mm) 150 250 350 450 550 650 136 FLIP-X 単軸ロボット ■ 基本仕様 ー N:NPN※1 P:PNP CC:CC-Link DN:DeviceNet PB:Profibus EN:Ethernet YC:YC-Link※2 E:CE仕様 110 TRANSERVO D:ケーブルダクト ー 2.5 LCM100 リニアコンベアモジュール ● クリーンタイプ ● ケーブルダクト 5 アプリケーション 2軸 Yストローク Yストローク+285(Y軸長) APPLICATION SXYxC Xストローク 150 250 350 450 L 628 728 828 928 1028 1128 1228 1328 1428 1528 650 750 850 950 1050 K 200 100 200 100 200 100 200 100 200 M 0 1 1 2 2 3 3 4 4 5 N 6 8 8 10 10 12 12 14 14 16 Yストローク 150 250 350 450 550 650 X軸 ストローク別最高速度注2 (mm/sec) 速度設定 418 550 適用コントローラ 1000 ー 100 800 650 550 80% 65% 55% RCX222 u 482 注1. 原点復帰時の移動範囲及びメカストッパによる停止位置です。 注2. X軸ストロークが850mm以上のとき、 動作領域によってはボールネジの共振が、 発生する場合があ ります(危険速度)。 その時は左記の表に示す最高速度を目安としてパラメータまたはプログラム上で速度を下げる調 整をしてください。 Yストローク+285(Y軸長) Yストローク 5 M 136 110 82 (1) 190 Xストローク+345 82 L(Xストローク+478) ユーザ配線・配管詳細図 MAX.940 80.5 77.5 78 80.5 77.5 39 100 100 200 アース端子(M4) 308 直交 117.5 78 単軸 MX200 K 150 250 350 450 L 628 728 828 928 1028 1128 1228 1328 1428 1528 550 650 750 850 950 1050 K 200 100 200 100 200 100 200 100 200 M 0 1 1 2 2 3 3 4 4 5 N 6 8 8 10 10 12 12 14 14 16 Yストローク 150 250 350 450 550 650 X軸 ストローク別最高速度注3 (mm/sec) 速度設定 1000 ー 注1. 原点復帰時の移動範囲及びメカストッパによる停止位置です。 スカラ Xストローク 100 800 650 550 80% 65% 55% 注2. X軸ストロークが850mm以上のとき、 動作領域によってはボールネジの共振が、 発生する場合があ ります(危険速度)。 その時は左記の表に示す最高速度を目安としてパラメータまたはプログラム上で速度を下げる調 整をしてください。 適用コントローラ RCX222 u 482 419 各種情報 N-M6×1.0 ネジ深さ10 コントローラ 153 5 M φ38 (吸引用配管) 107 68 2.5 2.5 216 160 A CONTROLLER INFORMATION 2 .5 (1-24番使用可) ユーザ配管1(φ6青) 110 170±3 5 70 20 20 クリーン 1 CLEAN 212.5 YP-X ピック&プレイス 116.5 101.5 78.5 YK-XG スカラロボット (68) XY-X 75 直交ロボット ユーザ配線 Dサブコネクタ ユーザ配管1(φ6赤) 注1 A部詳細図 322 PHASER 110 106 72 リニア単軸ロボット )深さ10 FLIP-X 2-φ6H7 ( 0 (ノック間±0.02) 単軸ロボット +0.012 ユーザ配管1(φ6黒) 小型単軸ロボット 84 4-M6×1.0 ネジ深さ12 5 51 TRANSERVO 5 282±3 136 LCM100 Xストローク リニアコンベアモジュール SXYxC 2軸 T3 アプリケーション 2軸 APPLICATION SXYxC APPLICATION アプリケーション LCM100 リニアコンベアモジュール SXYxC 3軸/ZSC ● クリーンタイプ ● ケーブルダクト ● Z軸シャフト上下タイプ 注文型式 SXYxC D ー ロボット本体 ー ー ー ー ー 小型単軸ロボット TRANSERVO ー ケーブル ー 組合せ ー X軸 ー Y軸 ー ZR軸 ー D: T1 15 ∼105cm 15 ∼ 65cm ZSC12 ケーブルダクト T3 ZSC6 15 Z軸 ー ー RCX340-3 適用コントローラ / 制御軸数 ー ケーブル長 3L:3.5m 5L:5m 10L:10m ー ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240S 適用コントローラ ー ー ー ー P.502 ー ー BB ー ー CE対応 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ P.489 ■ 最大可搬質量 (kg) X軸 軸構成※1 2 繰り返し位置決め精度※( mm) 駆動方式 ボールネジリード(減速比) (mm) 3 最高速度※( mm/sec) 動作範囲(mm) ロボットケーブル長(m) 吸引量 (Nℓ/min)エアー ZSC12 3 ZSC6 5 ■ 適用コントローラ コントローラ RCX340 RCX240S 運転方法 プログラム/ポイントトレース/ リモートコマンド/オンライン命令 SXYxC 3軸/ZSC T1 481±3 136 Xストローク 5 注1 82 190 136 ユーザ配管1(φ6青) M8×1.25 深さ7 A部詳細図 ユーザ配線・配管詳細図 Xストローク+345 L(Xストローク+478) 72 100 M×200 200 K N-M6×1.0 ネジ深さ10 119 319 149 78 143.5 (68) 75 (62) A 199 直交 100 322 61.5±2 Zストローク:150 308 78.5 101.5 116.5 アース端子(M4) 39 単軸 78 77.5 80.5 77.5 80.5 MAX.950 各種情報 40 78 40 226.5 236.5 82 110 2.5 5 M ユーザ配管1(φ6赤) φ12h7(-00.018 ) 5 170±3 M φ38 (吸引用配管) コントローラ CONTROLLER INFORMATION 216 2.5 107 68 クリーン CLEAN 160 110 (1) ユーザ配管1(φ6黒) ユーザ配線Dサブコネクタ (1-24番使用可) φ56 117.5 YP-X ピック&プレイス 5 20 51 5 YK-XG スカラロボット ※1. フレームの加工(取付穴・タップ穴)は単軸ロボットとは異なりますのでご注意ください。 ※2. 片振りでの繰り返し位置決め精度。 ※3. X軸ストロークが850mm以上のとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。 その時は図面下部の表に示す最高速度を目安としてパラメータまたはプログラム上で速度を下げる調整をしてください。 ※4. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※5. 必要吸引量は使用状態・使用環境で異なります。 Yストローク Yストローク+285(Y軸長) XY-X 直交ロボット クリーン度 Yストローク(mm) 150 ∼ 650 Z軸: ZSC6 ̶ C14 100 60 ±0.01 ±0.02 ボールネジ(C7級) ボールネジ(C10級) 20 12 6 1000 1000 500 150 ∼ 650 150 標準:3.5 オプション:5,10 CLASS 10※4 90※5 153 PHASER リニア単軸ロボット C14H 200 ±0.01 ボールネジ(C7級) 20 1000 150 ∼ 1050 モータ出力 AC(W) Z軸: ZSC12 Y軸 2.5 FLIP-X 単軸ロボット ■ 基本仕様 スカラ Xストローク L K M N 150 250 350 628 200 0 6 728 100 1 8 828 200 1 8 450 550 650 750 850 950 1050 928 1028 1128 1228 1328 1428 1528 100 200 100 200 100 200 100 2 2 3 3 4 4 5 10 10 12 12 14 14 16 Yストローク 150 250 350 450 Zストローク 150 X軸 ストローク別最高速度注2 (mm/sec) 速度設定 1000 ー 550 注1. 原点復帰時の移動範囲及びメカストッパによる停止位置です。 650 800 650 550 80% 65% 55% 注2. X軸ストロークが850mm以上のとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてパラメータまたはプログラム上で速度を下げる調整をしてください。 420 適用コントローラ RCX340 u 502 RCX240S u 489 Yストローク 5 110 MAX.950 78 39 M×200 200 100 アース端子(M4) 308 100 117.5 78 143.5 116.5 101.5 78.5 Zストローク:150 61.5±2 K 直交 322 N-M6×1.0 ネジ深さ10 150 250 350 628 200 0 6 728 100 1 8 828 200 1 8 450 550 650 750 850 950 1050 928 1028 1128 1228 1328 1428 1528 100 200 100 200 100 200 100 2 2 3 3 4 4 5 10 10 12 12 14 14 16 Yストローク 150 250 350 450 Zストローク 150 1000 ー 550 スカラ Xストローク L K M N X軸 ストローク別最高速度注2 (mm/sec) 速度設定 単軸 80.5 77.5 319 80.5 77.5 78 82 注1. 原点復帰時の移動範囲及びメカストッパによる停止位置です。 650 800 650 550 80% 65% 55% 注2. X軸ストロークが850mm以上のとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてパラメータまたはプログラム上で速度を下げる調整をしてください。 適用コントローラ RCX340 u 502 RCX240S u 489 421 各種情報 236.5 226.5 107 68 216 2.5 160 5 153 136 (1) φ38 (吸引用配管) 2.5 Yストローク+285(Y軸長) 20 170±3 5 82 190 コントローラ 2.5 M CONTROLLER INFORMATION 199 (68) クリーン M 40 75 CLEAN A YP-X 110 72 40 ピック&プレイス 149 YK-XG 119 51 注1 Xストローク+345 L(Xストローク+478) (62) スカラロボット ユーザ配線・配管詳細図 XY-X A部詳細図 直交ロボット M8×1.25 深さ7 PHASER φ12h7( -00.018 ) リニア単軸ロボット ユーザ配管1(φ6青) FLIP-X ユーザ配管1(φ6赤) φ56 単軸ロボット ユーザ配線 Dサブコネクタ (1-24番使用可) 小型単軸ロボット ユーザ配管1(φ6黒) 5 TRANSERVO 5 LCM100 481±3 136 Xストローク リニアコンベアモジュール SXYxC 3軸/ZSC T3 アプリケーション 3軸/ZSC APPLICATION SXYxC APPLICATION アプリケーション LCM100 リニアコンベアモジュール SXYxC 4軸/ZRSC ● クリーンタイプ ● ケーブルダクト ● シャフト上下タイプZR軸一体型 注文型式 SXYxC D ー ロボット本体 ー ー ー ー ー 小型単軸ロボット TRANSERVO ー ケーブル ー 組合せ ー X軸 ー Y軸 ー ZR軸 ー D: T1 15 ∼105cm 15 ∼ 65cm ZRSC12 ケーブルダクト T3 ZRSC6 15 Z軸 RCX340-4 ー ー 適用コントローラ / 制御軸数 ー ケーブル長 3L:3.5m 5L:5m 10L:10m ー ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) P.502 コントローラ各種設定項目をご指定ください。RCX340▶ RCX240S 適用コントローラ ー ー ー ー ー ー ー BB ー CE対応 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ P.489 ■ 最大可搬質量 (kg) X軸 Z軸 Z軸 ZRSC12 ZRSC6 Y軸 R軸 軸構成※1 ZRSC12 ZRSC6 5 3 4 ■ 適用コントローラ コントローラ 運転方法 SXYxC 4軸/ZRSC T1 481±3 136 Xストローク 注1 82 190 136 20 ユーザ配管1(φ6青) 153 M8×1.25 深さ7 A部詳細図 ユーザ配線・配管詳細図 Xストローク+345 L(Xストローク+478) 72 308 MX200 K 200 140.5 (68) 75 322 (62) A 199 100 直交 100 N-M6×1.0 ネジ深さ10 58.5±2 Zストローク:150 39 単軸 78 77.5 80.5 77.5 80.5 MAX.950 各種情報 アース端子(M4) 149 119 322 40 78 40 226.5 236.5 82 5 M ユーザ配管1(φ6赤) φ12h7(-00.018 ) 5 170±3 M 110 2.5 φ38 (吸引用配管) コントローラ CONTROLLER INFORMATION 216 2.5 107 68 クリーン CLEAN 160 110 (1) ユーザ配管1(φ6黒) ユーザ配線Dサブコネクタ (1-24番使用可) φ56 78 YP-X ピック&プレイス 5 5 2.5 51 117.5 YK-XG スカラロボット プログラム/ポイントトレース/ リモートコマンド/オンライン命令 RCX340 RCX240S 5 XY-X 直交ロボット ※1. フレームの加工(取付穴・タップ穴)は単軸ロボットとは異なりますのでご注意ください。 ※2. 片振りでの繰り返し位置決め精度。 ※3. X軸ストロークが850mm以上のとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。 その時は図面下部の表に示す最高速度を目安としてパラメータまたはプログラム上で速度を下げる調整をしてください。 ※4. 1cfあたり(0.1μmベース)、吸引ブロア使用時。 ※5. 必要吸引量は使用状態・使用環境で異なります。 Yストローク Yストローク+285(Y軸長) PHASER リニア単軸ロボット ̶ C14H C14 R5 200 100 60 100 2 繰り返し位置決め精度※( (R:°) ±0.01 ±0.01 ±0.02 ±0.005 XYZ:mm) 駆動方式 ボールネジ(C7級)ボールネジ(C7級) ボールネジ(C10級) ハーモニックギヤ ボールネジリード(減速比) (mm) (1/50) 20 20 12 6 3 最高速度※( (R:°/sec) XYZ:mm/sec) 1000 1000 1000 500 1020 動作範囲(XYZ:mm) (R:°) 150 ∼ 1050 150 ∼ 650 150 360 ロボットケーブル長(m) 標準:3.5 オプション:5,10 クリーン度 CLASS 10※4 吸引量(Nℓ/min)エアー 90※5 モータ出力 AC(W) Yストローク(mm) 150 250 350 450 550 650 78.5 101.5 116.5 FLIP-X 単軸ロボット ■ 基本仕様 スカラ Xストローク L K M N 150 628 200 0 6 250 728 100 1 8 350 828 200 1 8 450 550 650 750 850 950 1050 928 1028 1128 1228 1328 1428 1528 100 200 100 200 100 200 100 2 2 3 3 4 4 5 10 10 12 12 14 14 16 Yストローク 150 250 350 450 Zストローク 150 X軸 ストローク別最高速度注2 (mm/sec) 速度設定 1000 ー 550 注1. 原点復帰時の移動範囲及びメカストッパによる停止位置です。 650 800 650 550 80% 65% 55% 注2. X軸ストロークが850mm以上のとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてパラメータまたはプログラム上で速度を下げる調整をしてください。 422 適用コントローラ RCX340 u 502 RCX240S u 489 Yストローク 5 5 M 136 110 82 (1) 190 Xストローク+345 82 L(Xストローク+478) 72 107 68 2.5 216 160 170±3 5 153 2.5 M φ38 (吸引用配管) 2.5 Yストローク+285(Y軸長) 20 110 MAX.950 (68) 39 N-M6×1.0 ネジ深さ10 M×200 200 100 308 直交 150 628 200 0 6 250 728 100 1 8 350 828 200 1 8 450 550 650 750 850 950 1050 928 1028 1128 1228 1328 1428 1528 100 200 100 200 100 200 100 2 2 3 3 4 4 5 10 10 12 12 14 14 16 Yストローク 150 250 350 450 Zストローク 150 1000 ー 550 注1. 原点復帰時の移動範囲及びメカストッパによる停止位置です。 スカラ Xストローク L K M N X軸 ストローク別最高速度注2 (mm/sec) 速度設定 K アース端子(M4) 100 75 117.5 116.5 101.5 78.5 78 140.5 322 単軸 Zストローク:150 58.5±2 80.5 77.5 78 80.5 77.5 322 40 650 800 650 550 80% 65% 55% 注2. X軸ストロークが850mm以上のとき、動作領域によってはボールネジの共振が発生する場合があります(危険速度)。その時は上記の表に示す最高速度を目安としてパラメータまたはプログラム上で速度を下げる調整をしてください。 適用コントローラ RCX340 u 502 RCX240S u 489 423 各種情報 78 注1 コントローラ 236.5 226.5 51 CONTROLLER INFORMATION 199 クリーン A CLEAN 40 YP-X 149 ピック&プレイス 119 YK-XG (62) スカラロボット ユーザ配線・配管詳細図 XY-X A部詳細図 直交ロボット M8×1.25 深さ7 PHASER φ12h7(-00.018 ) リニア単軸ロボット ユーザ配管1(φ6青) FLIP-X ユーザ配管1(φ6赤) φ56 単軸ロボット ユーザ配線 Dサブコネクタ (1-24番使用可) 小型単軸ロボット ユーザ配管1(φ6黒) 5 TRANSERVO 5 LCM100 481±3 136 Xストローク リニアコンベアモジュール SXYxC 4軸/ZRSC T3 アプリケーション 4軸/ZRSC APPLICATION SXYxC LCM100 リニアコンベアモジュール ● アーム長 180mm ● 最大可搬質量 1kg 注文型式 YK180XC 100 ー ロボット本体 ー ー RCX340-4 小型単軸ロボット TRANSERVO 適用コントローラ / 制御軸数 ー Z軸ストローク ー ケーブル長 100:100mm 3L:3.5m 5L:5m 10L:10m ー ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240S 適用コントローラ ー ー ー ー P.502 ー ー ー コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ Y軸 Z軸 R軸 71 109 100 ̶ (Z:mm) 動作範囲(XYR:°) ±120 ±140 ̶ ±360 50 30 30 30 ±0.01 ±0.01 ±0.004 3.3 0 .7 1700 1 繰り返し位置決め精度※( (R:°) XYZ:mm) 最高速度(XYZ:m/sec) (R:°/sec) 最大可搬質量(kg) コントローラ 電源容量(VA) RCX340 RCX240S 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 500 1.0 2 標準サイクルタイム:0.1kg 可搬時※( sec) 0.42 3 R軸許容慣性モーメント※( kgm2) 0.01 0.1×8 ユーザ配管(外径) φ3×2 動作リミット設定 1.ソフトリミット 2.メカリミット(X,Y,Z軸) ロボットケーブル長 (m) 標準:3.5 オプション:5,10 本体質量(kg) (ロボットケーブル含まず)※4 6.5 1.5kg(3.5m) 2.1kg(5m) 4.2kg(10m) クリーン度 CLASS 10(0.1μmベース) 吸引量(Nℓ/min)エアー ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 30 YP-X ピック&プレイス 周囲温度一定時の値です(X、Y軸)。 上下移動25mm、水平移動100mmの往復動作時。 加速度係数の設定に制限があります。 ロボット全体の質量は、本体質量とロボットケーブルの質量を足したものになります。 YK180XC ユーザ配線用Dサブコネクタ9ピン (1∼8番使用可能) 92 に当たりますので動作させないでください。 取付M6ボルト,4本使用 R71 R10 57° 67 67 この動作範囲内側限界よりも 内側ではZ軸フランジがベー 57° スに当たりますので動作させ ないでください。 右手系動作範囲 左手系動作範囲 9 64 74 90 105 500 (アーム 旋廻時510) 各種情報 直交 0 φ30h7 -0.021 0 詳細 A ユーザ配管2(隔壁ユニオンφ3) フランジ ユーザ配管1(隔壁ユニオンφ3) 5mm上昇 Z軸原点復帰時 28 0 ベース背面にはメンテナンス上の十分なスペースを 確保してください。 B 30 M3アース端子 X軸原点は ベース正面から 0°±5° ° °±5 16 24 φ10H7 +00.015 深さ2 5.3 5.3 4-M3x0.5 深さ6 X,Y,R軸関節部吸引用配管(隔壁ユニオンφ6) 110 Z軸 26 5.3 26 5.3 ユーザツール取付タップ A 詳細 B 424 R27 (ケーブル最小曲げ半径) ケーブル は可動させないでください。 ユーザツール取付フランジセンターラインは R軸原点に対して±5°以内のずれがあります。 適用コントローラ 133 スカラ 4-M3x0.5 深さ6 Z軸ストローク 埋詮 ユーザ配線用Dサブコネクタ9ピン (1∼8番使用可能) カバー内吸引用配管(隔壁ユニオンφ8) 183 100 φ55 105±2 (Z軸原点位置) 単軸 12:ユーザツール取付範囲 335 223 4-φ9 X,Y軸原点位置 原点復帰を行う場合は、上記位置より反時計回り位置に あらかじめ移動してください RCX340 u 502 RCX240S u 489 0 R3 ° 120 140° 09 R1 80 489 484 R71 125 71 45 R1 109 ° 44 40.5 R 1 09 R1 0 コントローラ CONTROLLER INFORMATION ユーザ配管1(バーブ継手φ3) ユーザ配管2(バーブ継手φ3) 80 120 140° .5 R3 クリーン CLEAN R32 15 R30内側領域をまたぐ動作を行うとZ軸フランジがベース 4-φ7 30 YK-XG スカラロボット ロボットケーブル質量 9 XY-X 直交ロボット ユーザ配線(sq×本) R10 PHASER リニア単軸ロボット X軸 アーム長(mm) モータ出力 AC(W) ※1. ※2. ※3. ※ 4. P.489 ■ 適用コントローラ 120 ° 140° FLIP-X 単軸ロボット ■ 基本仕様 軸仕様 BB ー CE対応 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ 30 アプリケーション ※ 受注生産ですので、納期は弊社営業までお問い合わせください。 120 ° 140° APPLICATION YK180XC ー ー ー CE対応 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ ■ 基本仕様 X軸 Y軸 Z軸 R軸 111 109 100 ̶ 回転範囲(°) ±120 ±140 ̶ ±360 50 30 30 30 ±0.01 ±0.01 ±0.004 3.4 0 .7 1700 モータ出力 AC(W) 1 繰り返し位置決め精度※( (R:°) XYZ:mm) 最高速度(XYZ:m/sec) (R:°/sec) 最大可搬質量(kg) コントローラ 電源容量(VA) RCX340 RCX240S 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 500 1.0 2 標準サイクルタイム:0.1kg 可搬時※( sec) 0.45 3 R軸許容慣性モーメント※( kgm2) 0.01 ユーザ配線(sq×本) 0.1×8 ユーザ配管(外径) φ3×2 動作リミット設定 1.ソフトリミット 2.メカストッパ(XYZ軸) ロボットケーブル長(m) 標準:3.5 オプション:5,10 ※4 本体質量(kg) (ロボットケーブル含まず) 6.5 ロボットケーブル質量 1.5kg(3.5m) 2.1kg(5m) 4.2kg(10m) クリーン度 CLASS 10(0.1μmベース) 吸引量(Nℓ/min)エアー ※1. ※2. ※3. ※4. P.489 ■ 適用コントローラ アーム長(mm) 軸仕様 BB ー クリーン ー CLEAN 適用コントローラ ー YP-X ー P.502 ピック&プレイス ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240S ー YK-XG ー スカラロボット ー XY-X ー 直交ロボット ー PHASER 適用コントローラ / 制御軸数 ー Z軸ストローク ー ケーブル長 100:100mm 3L:3.5m 5L:5m 10L:10m ー リニア単軸ロボット ー FLIP-X RCX340-4 単軸ロボット ロボット本体 ー ー 小型単軸ロボット ー TRANSERVO YK220XC 100 LCM100 注文型式 リニアコンベアモジュール ● アーム長 220mm ● 最大可搬質量 1kg アプリケーション ※ 受注生産ですので、納期は弊社営業までお問い合わせください。 APPLICATION YK220XC ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 30 周囲温度一定時の値です。 水平方向100mm、垂直方向25mm往復、粗位置決め時。 加速度係数の設定に制限があります。 ロボット全体の質量は、本体質量とロボットケーブルの質量を足したものになります。 YK220XC R30内側領域をまたぐ動作を行うとZ軸フランジがベース に当たりますので動作させないでください。 ° 120 140° R2 30 09 R1 30 R3 0 ° 120 74 90 105 64 100Z軸ストローク Z軸原点復帰時 5mm上昇 12:ユーザツール取付範囲 105±2 (Z軸原点位置) 4-M3x0.5 深さ6 フランジ 28 0 ベース背面にはメンテナンス上の十分なスペースを 確保してください。 30 X軸原点は ベース正面から 0°±5° 26 5.3 ° °±5 133 B M3アース端子 26 5.3 16 24 5.3 5.3 ユーザ配管2(隔壁ユニオンφ3) ユーザ配管1(隔壁ユニオンφ3) スカラ ユーザツール取付用タップ 0 0 φ10H7+0.015 深さ2 X,Y,R軸関節部吸引用配管(隔壁ユニオンφ6) 110 直交 詳細 A 4-M3x0.5 深さ6 0 φ30h 7 -0.021 カバー内吸引用配管(隔壁ユニオンφ8) A Z軸 単軸 埋詮 ユーザ配線用Dサブコネクタ9ピン (1∼8番使用可能) 183 R27 (ケーブル最小曲げ半径) ケーブル 詳細 B は可動させないでください。 ユーザツール取付フランジセンターラインは R軸原点に対して±5°以内のずれがあります。 適用コントローラ 4-φ9 X,Y軸原点位置 原点復帰を行う場合は、上記位置より反時計回り位置に あらかじめ移動してください RCX340 u 502 RCX240S u 489 425 各種情報 φ55 コントローラ 67 この動作範囲内側限界よりも 内側ではZ軸フランジがベー 75° スに当たりますので動作させ ないでください。 左手系動作範囲 右手系動作範囲 CONTROLLER INFORMATION 67 335 223 ° (アーム 旋廻時510) 120 75° 500 R75 9 111 9 R 10 489 484 45 140° 109 R10 0 44 R109 R3 125 ° 40.5 ユーザ配管1(バーブ継手φ3) ユーザ配管2(バーブ継手φ3) R75 120 .5 140° 4-φ7 取付M6ボルト,4本使用 140° 92 20 R32 15 20 R2 ユーザ配線用Dサブコネクタ9ピン (1∼8番使用可能) APPLICATION アプリケーション LCM100 リニアコンベアモジュール YK250XGC ● アーム長 250mm ● 最大可搬質量 4kg 注文型式 YK250XGC 150 ー ロボット本体 ー S ー ー ー RCX340-4 小型単軸ロボット TRANSERVO 適用コントローラ / 制御軸数 ー Z軸ストローク ー ツールフランジ ー 中通しシャフト ー ケーブル長 無記入:なし 150:150mm S:あり 3L:3.5m F:あり 5L:5m 10L:10m ー ー ー ー ー 適用コントローラ ー ー ー P.502 ー ー ■ 適用コントローラ Y軸 Z軸 R軸 150 150 ̶ 回転範囲(°) ±129 ±134 ̶ ±360 200 150 50 100 ±0.01 ±0.01 ±0.004 4.5 1 .1 1020 モータ出力 AC(W) 1 繰り返し位置決め精度※( (R:°) XYZ:mm) 最高速度(XYZ:m/sec) (R:°/sec) 最大可搬質量(kg) BB RCX340 RCX240S 電源容量(VA) P.489 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 1000 4 標準サイクルタイム:2kg 可搬時(sec)※2 0.57 3 R軸許容慣性モーメント※( kgm2) 0.2×10 ユーザ配管(外径) φ4×4 動作リミット設定 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) ロボットケーブル長 (m) ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 ※ 精度良く基準座標を設定するには、基準座標設定治具(オプション) を使用して行ないます。詳細は取扱説明書(設置マニュアル)をご参照 ください。 標準:3.5 オプション:5,10 本体質量(kg) 21.5 30 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 上下移動25mm、水平移動300mmの往復動作時(粗位置決めアーチモーション)。 加速度係数の設定に制限があります。P.531をご参照ください。 クラス10(0.1μm)FED-STD-209D相当。 ESD仕様はオプション対応です。弊社営業までお問い合わせください。 必要吸引量は使用状態・使用環境で異なります。 YK250XGC 13.4 8 R10 (150) ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 428 単軸 直交 246 221 202 167 φ90 173 133 120 Z軸ジャバラ A A 150 Z軸下降端メカストッパ位置 4 11 φ Z軸上昇端メカストッパ位置 Z軸原点復帰時、Z軸4mm上昇 空 径 0 中 断面図 A-A 50 70 20 28 M4アース端子 10 適用コントローラ 6 31 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 22.5 26 98 61 32 0 φ70 φ38 0 φ16 h7 - 0.018 ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に R32(ケーブル最小曲げ半径) 含めてください。 ケーブルは可動させないでください。 426 93 71 58 45 32 12 0 39 39 10 10 2面幅15 0 95.5 吸引用継手φ12 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 ユーザ配管4(φ4白) 4 スカラ 54.5±2 ユーザ配管2(φ4赤) ユーザ配管3(φ4青) 48 46° 0 各種情報 632±10 アーム旋回時最大660 57 R 15 マシンハーネス 51 43 184 ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:136° 510 283 264 234 R250 視図F 46° 689 661 614 R40 13.4 213 63 100 4-φ9 取付M8ボルト、4本使用 12 183(ベース取付部寸法) 117 アーム旋回時最大240 ° 56↓F 150 130 52 ° コントローラ CONTROLLER INFORMATION ユーザ配管2(φ4赤) 839 809 62 10 53 φ11 129 30 中空径 134 ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください 配線配管クランプ用ですので 大きな負荷を付けないで ください。 ° 104 60 60 140 96 90 クリーン CLEAN 使用しない場合は付属のキャップをかぶせてください この動作範囲内側限界よりも内側ではZ軸ジャバラが ベースに、または、アームがマシンハーネスに当たり ますので動作させないでください。 R40内側領域をまたぐ動作を 行うとZ軸ジャバラがベース に当たりますので動作させな いでください。 4-M3x0.5 深さ 5 (R軸原点との位相関係なし) 212 134° ユーザ配管3(φ4青) ユーザ配管4(φ4白) ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 42 YP-X ピック&プレイス 吸引量(Nℓ/min)エアー ※6 129 YK-XG スカラロボット 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 クラスISO3(ISO14644-1)※4+ESD ※5 クリーン度 10 10 XY-X 直交ロボット ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 0.05 ユーザ配線(sq×本) ※1. ※2. ※3. ※ 4. ※5. ※6. コントローラ 7.8 PHASER リニア単軸ロボット X軸 100 7.8 FLIP-X 単軸ロボット ■ 基本仕様 軸仕様 ー ー CE対応 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ アーム長(mm) ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240S ー Z軸先端形状 4-φ11 RCX340 u 502 RCX240S u 489 ユーザツール取付範囲 ° R40 134° 129 213 63 104 60 60 140 96 90 7.8 7.8 スカラ 90° .6 4 2 22 7± 0 22 .02 .6 150 直交 39 39 10 10 単軸 RCX340 u 502 RCX240S u 489 視図E 427 各種情報 + 0.012 φ4 H7 0 通し コントローラ CONTROLLER INFORMATION .6 適用コントローラ 詳細図 D 22 4-φ11 .6 ケーブルは可動させないでください。 22 φ55 R32(ケーブル最小曲げ半径) 0 φ30 h7 -0.021 2 ↑E 0.0 ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に 含めてください。 4-φ4.5 通し 11 28 φ35 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 .6± 20 22.5 26 22 50 70 6 31 径φ 99.5 10 98 61 32 0 中空 M4アース端子 クリーン 吸引用継手φ12 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 93 71 58 45 32 12 0 D CLEAN 65 50.5 ±2 0 YP-X Z軸ジャバラ ピック&プレイス ユーザ配管2(φ4赤) ユーザ配管4(φ4白) YK-XG ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 ユーザ配管3(φ4青) スカラロボット 0 46° ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:136° マシンハーネス XY-X 184 R15 46° 直交ロボット 8 R10 PHASER R250 リニア単軸ロボット 13.4 視図F FLIP-X 13.4 単軸ロボット 取付M8ボルト、4本使用 12 183(ベース取付部寸法) 小型単軸ロボット 130 TRANSERVO 53 52 ° 10 4-φ9 129 ユーザ配管2(φ4赤) 62 φ11 ° 30 中空径 134 ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 配線配管クランプ用ですので 大きな負荷を付けないで ください。 LCM100 使用しない場合は付属のキャップをかぶせてください。 この動作範囲内側限界よりも内側ではZ軸ジャバラが ベースに、または、アームがマシンハーネスに当たり ますので動作させないでください。 R40内側領域をまたぐ動作を 行うとZ軸ジャバラがベース に当たりますので動作させな いでください。 4-M3x0.5 深さ 5 (R軸原点との位相関係なし) 212 リニアコンベアモジュール ユーザ配管3(φ4青) ユーザ配管4(φ4白) アプリケーション YK250XGC ツールフランジ取付仕様 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) APPLICATION YK250XGC APPLICATION アプリケーション LCM100 リニアコンベアモジュール YK350XGC ● アーム長 350mm ● 最大可搬質量 4kg 注文型式 YK350XGC 150 ー ロボット本体 ー S ー ー ー RCX340-4 ー 小型単軸ロボット TRANSERVO 適用コントローラ / 制御軸数 ー Z軸ストローク ー ツールフランジ ー 中通しシャフト ー ケーブル長 無記入:なし 150:150mm S:あり 3L:3.5m F:あり 5L:5m 10L:10m ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240S ー 適用コントローラ ー ー P.502 ー ー ■ 適用コントローラ 回転範囲(°) Y軸 Z軸 R軸 150 150 ̶ ±129 ±134 ̶ ±360 200 150 50 100 ±0.01 ±0.01 ±0.004 5.6 1 .1 1020 1 繰り返し位置決め精度※( (R:°) XYZ:mm) 最高速度(XYZ:m/sec) (R:°/sec) 最大可搬質量(kg) BB 電源容量(VA) RCX340 RCX240S P.489 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 1000 4 標準サイクルタイム:2kg 可搬時(sec)※2 0.57 3 R軸許容慣性モーメント※( kgm2) 0.2×10 ユーザ配管(外径) φ4×4 動作リミット設定 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) ロボットケーブル長 (m) ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 ※ 精度良く基準座標を設定するには、基準座標設定治具(オプション) を使用して行ないます。詳細は取扱説明書(設置マニュアル)をご参照 ください。 標準:3.5 オプション:5,10 本体質量(kg) 22 30 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 上下移動25mm、水平移動300mmの往復動作時(粗位置決めアーチモーション)。 加速度係数の設定に制限があります。P.531をご参照ください。 クラス10(0.1μm)FED-STD-209D相当。 ESD仕様はオプション対応です。弊社営業までお問い合わせください。 必要吸引量は使用状態・使用環境で異なります。 YK350XGC 4-M3x0.5 深さ 5 (R軸原点との位相関係なし) 212 13.4 184 76° 11 φ 4 径 空 93 71 58 45 32 12 0 M4アース端子 10 Z軸下降端メカストッパ位置 20 28 6 31 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 39 39 10 10 中 2面幅15 50 70 22.5 26 98 61 32 0 φ70 φ38 0 φ16 h7- 0.018 ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に 含めてください。 428 0 Z軸上昇端メカストッパ位置 Z軸原点復帰時、Z軸4mm上昇 150 スカラ 断面図 A-A A 4 直交 Z軸ジャバラ 95.5 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 246 ユーザ配管4(φ4白) 221 202 167 42 単軸 0 吸引用継手φ12 ユーザ配管3(φ4青) 48 φ90 A ユーザ配管2(φ4赤) 57 10 10 各種情報 ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 428 51 43 76° ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:136° 510 54.5±2 276 視図F 632±10 アーム旋回時最大660 173 133 120 44 マシンハーネス 689 661 614 283 264 234 R1 R350 R32(ケーブル最小曲げ半径) ケーブルは可動させないでください。 適用コントローラ R 150 (150) 200 13.4 12 183(ベース取付部寸法) 117 アーム旋回時最大190 134° 90 130 取付M8ボルト、4本使用 ° 56↓F 150 53 4-φ9 129 10 φ11 ° コントローラ CONTROLLER INFORMATION ユーザ配管2(φ4赤) 839 809 62 30 中空径 134 クリーン CLEAN ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください この動作範囲内側限界よりも内側 ではZ軸ジャバラがベースに、 または、アームがマシンハーネス に当たりますので動作させないで ください。 配線配管クランプ用ですので 大きな負荷を付けないで ください。 ° ユーザ配管3(φ4青) ユーザ配管4(φ4白) ユーザ配線用コネクタ (1∼10番使用可能、 ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください 104 60 60 140 YP-X ピック&プレイス 吸引量(Nℓ/min)エアー ※6 96 YK-XG スカラロボット 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 クラスISO3(ISO14644-1)※4+ESD ※5 クリーン度 129 XY-X 直交ロボット ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 0.05 ユーザ配線(sq×本) ※1. ※2. ※3. ※ 4. ※5. ※6. コントローラ 7.8 PHASER リニア単軸ロボット モータ出力 AC(W) X軸 200 7.8 FLIP-X 単軸ロボット ■ 基本仕様 軸仕様 ー ー CE対応 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ アーム長(mm) ー 4-φ11 RCX340 u 502 RCX240S u 489 Z軸先端形状 ユーザツール取付範囲 PHASER リニア単軸ロボット XY-X 直交ロボット YK-XG スカラロボット YP-X ピック&プレイス CLEAN クリーン 134° ° 7.8 129 90 104 60 60 140 96 7.8 44 276 R 150 76° ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 吸引用継手φ12 ユーザ配管3(φ4青) 90° .6 22 2 4 + 0.012 φ4 H7 0 通し 7± 0 22 .02 .6 150 39 39 10 10 スカラ .6 適用コントローラ 詳細図 D 22 ケーブルは可動させないでください。 4-φ11 2 0 φ30 h7 - 0.021 0.0 ↑E φ55 R32(ケーブル最小曲げ半径) 4-φ4.5 通し .6 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 22 φ35 .6 ± 28 31 22.5 26 22 20 6 11 99.5 10 径φ M4アース端子 98 61 32 0 中空 93 71 58 45 32 12 0 D 直交 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 ユーザ配管4(φ4白) Z軸ジャバラ 単軸 ユーザ配管2(φ4赤) RCX340 u 502 RCX240S u 489 視図E 429 各種情報 ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:136° コントローラ 視図F CONTROLLER INFORMATION 12 183(ベース取付部寸法) R1 R350 13.4 マシンハーネス ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に 含めてください。 FLIP-X 130 13.4 184 50 70 単軸ロボット 取付M8ボルト、4本使用 ° 4-φ9 76° 65 50.5±2 0 小型単軸ロボット φ11 129 53 中空径 ° 10 この動作範囲内側限界よりも内側 ではZ軸ジャバラがベースに、 または、アームがマシンハーネス に当たりますので動作させないで ください。 配線配管クランプ用ですので 大きな負荷を付けないで ください。 134 ユーザ配管2(φ4赤) TRANSERVO (R軸原点との位相関係なし) 212 62 30 LCM100 4-M3x0.5 深さ 5 ユーザ配管3(φ4青) ユーザ配管4(φ4白) ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 リニアコンベアモジュール ユーザ配線用コネクタ (1∼10番使用可能、 ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 アプリケーション YK350XGC ツールフランジ取付仕様 APPLICATION YK350XGC APPLICATION アプリケーション LCM100 リニアコンベアモジュール YK400XGC ● アーム長 400mm ● 最大可搬質量 4kg 注文型式 YK400XGC 150 ー ロボット本体 ー S ー ー ー RCX340-4 小型単軸ロボット TRANSERVO 適用コントローラ / 制御軸数 ー Z軸ストローク ー ツールフランジ ー 中通しシャフト ー ケーブル長 無記入:なし 150:150mm S:あり 3L:3.5m F:あり 5L:5m 10L:10m ー ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240S 適用コントローラ ー ー ー P.502 ー ー ■ 適用コントローラ 回転範囲(°) Y軸 Z軸 R軸 150 150 ̶ ±129 ±144 ̶ ±360 200 150 50 100 ±0.01 ±0.01 ±0.004 6.1 1 .1 1020 1 繰り返し位置決め精度※( (R:°) XYZ:mm) 最高速度(XYZ:m/sec) (R:°/sec) 最大可搬質量(kg) BB 電源容量(VA) RCX340 RCX240S P.489 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 1000 4 標準サイクルタイム:2kg 可搬時(sec)※2 ユーザ配線(sq×本) 0.57 0.05 0.2×10 ユーザ配管(外径) φ4×4 動作リミット設定 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) 3 R軸許容慣性モーメント※( kgm2) ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 ※ 精度良く基準座標を設定するには、基準座標設定治具(オプション) を使用して行ないます。詳細は取扱説明書(設置マニュアル)をご参照 ください。 標準:3.5 オプション:5,10 本体質量(kg) 22.5 30 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 上下移動25mm、水平移動300mmの往復動作時(粗位置決めアーチモーション)。 加速度係数の設定に制限があります。P.532をご参照ください。 クラス10(0.1μm)FED-STD-209D相当。 ESD仕様はオプション対応です。弊社営業までお問い合わせください。 必要吸引量は使用状態・使用環境で異なります。 YK400XGC 4-M3x0.5 深さ 5 212 104 60 60 140 ° 144 307 0 150 93 71 58 45 32 12 0 M4アース端子 10 Z軸下降端メカストッパ位置 28 31 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 39 39 10 10 20 6 98 61 32 0 22.5 26 φ70 φ38 42 11 径 φ 空 中 2面幅15 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 246 ユーザ配管4(φ4白) 221 202 167 4 スカラ 50 70 吸引用継手φ12 ユーザ配管3(φ4青) Z軸上昇端メカストッパ位置 Z軸原点復帰時、Z軸4mm上昇 0 φ16 h7- 0.018 ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に 含めてください。 430 ユーザ配管2(φ4赤) A 4 直交 断面図 A-A 428 48 Z軸ジャバラ A 94° ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 57 φ90 95.5 184 510 10 10 51 43 R32(ケーブル最小曲げ半径) ケーブルは可動させないでください。 適用コントローラ この動作範囲内側限界よりも内側 ではZ軸ジャバラがベースに、 または、アームがマシンハーネス に当たりますので動作させないで ください。 ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:146° マシンハーネス 単軸 0 R156 94° 632±10 アーム旋回時最大660 54.5±2 R400 アーム旋回時最大190 (150) 各種情報 173 133 120 13.4 視図F 117 250 689 661 614 283 264 234 13.4 9° 取付M8ボルト、4本使用 12 183(ベース取付部寸法) 130 ° 56↓F 150 53 R150 コントローラ CONTROLLER INFORMATION 10 4-φ9 62 12 30 ユーザ配管2(φ4赤) 144 クリーン CLEAN ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 839 809 (R軸原点との位相関係なし) 配線配管クランプ用ですので 大きな負荷を付けないで ください。 中空径 φ11 ° ユーザ配管3(φ4青) ユーザ配管4(φ4白) ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 96 YP-X ピック&プレイス 吸引量 (Nℓ/min)エアー ※6 90 YK-XG スカラロボット 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 クラスISO3(ISO14644-1)※4+ESD ※5 クリーン度 129 XY-X 直交ロボット ロボットケーブル長 (m) ※1. ※2. ※3. ※ 4. ※5. ※6. コントローラ 7.8 PHASER リニア単軸ロボット モータ出力 AC(W) X軸 250 7.8 FLIP-X 単軸ロボット ■ 基本仕様 軸仕様 ー ー CE対応 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ アーム長(mm) ー 4-φ11 RCX340 u 502 RCX240S u 489 Z軸先端形状 ユーザツール取付範囲 FLIP-X 単軸ロボット PHASER リニア単軸ロボット XY-X 直交ロボット YK-XG スカラロボット YP-X ピック&プレイス CLEAN クリーン ° 7.8 144 ° 90 104 60 60 140 7.8 13.4 129 96 13.4 取付M8ボルト、4本使用 R400 この動作範囲内側限界よりも内側 ではZ軸ジャバラがベースに、 または、アームがマシンハーネス に当たりますので動作させないで ください。 R156 307 R150 184 94° 94° マシンハーネス ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 ユーザ配管2(φ4赤) 適用コントローラ 詳細図 D 90° .6 4 2 ケーブルは可動させないでください。 22 150 39 39 10 10 R32(ケーブル最小曲げ半径) 4-φ11 .6 0 φ30 h7 - 0.021 22 ↑E φ55 2 0.0 ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に 含めてください。 4-φ4.5 通し .6 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 22 28 φ35 .6± 20 31 22 50 70 6 11 99.5 10 径φ M4アース端子 98 61 32 0 22.5 26 スカラ D 中空 93 71 58 45 32 12 0 + 0.012 φ4 H7 0 通し 7± 0 22 .02 .6 Z軸ジャバラ 直交 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 ユーザ配管4(φ4白) 65 50.5±2 0 単軸 吸引用継手φ12 ユーザ配管3(φ4青) RCX340 u 502 RCX240S u 489 視図E 431 各種情報 ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:146° コントローラ 視図F 12 183(ベース取付部寸法) CONTROLLER INFORMATION 130 小型単軸ロボット 53 4-φ9 ° 10 φ11 ° 62 TRANSERVO 中空径 配線配管クランプ用ですので 大きな負荷を付けないで ください。 129 30 ユーザ配管2(φ4赤) LCM100 4-M3x0.5 深さ 5 (R軸原点との位相関係なし) 212 144 ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 リニアコンベアモジュール ユーザ配管3(φ4青) ユーザ配線用コネクタ ユーザ配管4(φ4白) (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 アプリケーション YK400XGC ツールフランジ取付仕様 APPLICATION YK400XGC APPLICATION アプリケーション LCM100 リニアコンベアモジュール YK500XGLC ● アーム長 500mm ● 最大可搬質量 4kg 注文型式 YK500XGLC 150 ー ロボット本体 ー ー S ー ー RCX340-4 小型単軸ロボット TRANSERVO 適用コントローラ / 制御軸数 ー Z軸ストローク ー ツールフランジ ー 中通しシャフト ー ケーブル長 無記入:なし 150:150mm S:あり 3L:3.5m F:あり 5L:5m 10L:10m ー ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240S ー 適用コントローラ ー ー ー P.502 ー ー ー コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ 軸仕様 ■ 適用コントローラ 回転範囲(°) モータ出力 AC(W) 1 繰り返し位置決め精度※( (R:°) XYZ:mm) ±0.01 最高速度(XYZ:m/sec) (R:°/sec) 5.1 最大可搬質量(kg) Z軸 150 R軸 ̶ ±360 50 ±0.01 1 .1 100 ±0.004 1020 コントローラ RCX340 RCX240S ユーザ配管(外径) 動作リミット設定 ロボットケーブル長(m) 本体質量(kg) クリーン度 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 ※ 精度良く基準座標を設定するには、基準座標設定治具(オプション) を使用して行ないます。詳細は取扱説明書(設置マニュアル)をご参照 ください。 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 上下移動25mm、水平移動300mmの往復動作時(粗位置決めアーチモーション)。 加速度係数の設定に制限があります。P.532をご参照ください。 クラス10(0.1μm)FED-STD-209D相当。 ESD仕様はオプション対応です。弊社営業までお問い合わせください。 必要吸引量は使用状態・使用環境で異なります。 YK500XGLC 104 60 60 140 96 90 5 R15 R2 50 12 183(ベース取付部寸法) ↓F 56 702 674 627 250 117 250 (150) 各種情報 852 822 184 75° 75° ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:146° アーム旋回時最大160 マシンハーネス ° 13.4 視図F 9° 13.4 取付M8ボルト、4本使用 144 62 30 10 53 130 この動作範囲内側限界よりも 内側ではZ軸ジャバラがベース に、または、アームがマシン ハーネスに当たりますので 動作させないでください。 00 4-φ9 ユーザ配管を使用しない場合は付属の埋栓をしてください。 ユーザ配管2(φ4赤) R5 コントローラ 675±10 アーム旋回時最大730 ユーザ配管1(φ4黒) ユーザ配管2(φ4赤) ユーザ配管を使用しない場合は付属の埋栓をしてください。 523 単軸 441 径 4 0 Z軸上昇端メカストッパ位置 Z軸原点復帰時、Z軸4mm上昇 Z軸下降端メカストッパ位置 M4アース端子 28 50 70 20 空 71 58 45 32 12 0 6 31 98 61 32 0 22.5 26 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 39 39 10 10 適用コントローラ 10 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 φ70 φ38 10 10 82.5 φ 11 ユーザ配管3(φ4青) 256 221 ユーザ配管4(φ4白) 202 167 93 A ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に 含めてください。 432 吸引用継手φ12 48 Z軸ジャバラ A 中 2面幅15 断面図 A-A 57 φ90 4 スカラ 0 51 43 150 直交 296 274 247 186 146 133 . 67 5±2 42 CONTROLLER INFORMATION ユーザ配管1(φ4黒) 1 12 クリーン CLEAN 212 407 ユーザ配管4(φ4白) ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 4-M3x0.5 深さ 5 (R軸原点との位相関係なし) 配線配管クランプ用ですので 大きな負荷を付けないで ください。 中空径 φ1 4° ユーザ配管3(φ4青) 14 YP-X ピック&プレイス 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 ° YK-XG スカラロボット 吸引量 (Nℓ/min)エアー 1000 P.489 ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 7.8 XY-X 直交ロボット 3 R軸許容慣性モーメント※( kgm2) ユーザ配線(sq×本) 電源容量(VA) ̶ 4 0.74 0.05 0.2×10 φ4×4 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) 標準:3.5 オプション:5,10 25 クラスISO3(ISO14644-1)※4+ESD ※5 30※6 標準サイクルタイム:2kg 可搬時(sec)※2 ※1. ※2. ※3. ※ 4. ※5. ※6. Y軸 250 ±144 150 7.8 PHASER リニア単軸ロボット X軸 250 ±129 200 129 FLIP-X 単軸ロボット ■ 基本仕様 アーム長 (mm) BB ー CE対応 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ 0 φ16 h7 - 0.018 R32(ケーブル最小曲げ半径) ケーブルは可動させないで ください。 4-φ11 RCX340 u 502 RCX240S u 489 Z軸先端形状 ユーザツール取付範囲 14 ° 4° 7.8 7.8 129 単軸 スカラ 50 R2 90° 22 .6 4 RCX340 u 502 RCX240S u 489 7± 0 22 .02 .6 2 直交 詳細図 D 視図E 433 各種情報 .6 + 0.012 φ4H7 0 通し コントローラ CONTROLLER INFORMATION 407 104 60 60 140 96 クリーン 90 CLEAN 150 YP-X ピック&プレイス 22 39 39 10 10 YK-XG .6 22 適用コントローラ 0 φ30h7- 0.021 2 ケーブルは可動させないで ください。 4-φ11 ↑E φ55 0.0 R32(ケーブル最小曲げ半径) 11 φ35 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 .6± ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に 含めてください。 6 31 22 28 50 70 20 10 98 61 32 0 22.5 26 径φ M4アース端子 スカラロボット ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 中空 86.5 93 71 58 45 32 12 0 D XY-X 吸引用継手φ12 Z軸ジャバラ 直交ロボット ユーザ配管2(φ4赤) ユーザ配管を使用しない場合は付属の埋栓をしてください。 78 63.5±2 0 PHASER 75° ユーザ配管1(φ4黒) ユーザ配管4(φ4白) リニア単軸ロボット 184 75° ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:146° ユーザ配管3(φ4青) FLIP-X 5 R15 マシンハーネス 単軸ロボット ° 12 183(ベース取付部寸法) 9° 13.4 視図F 144 13.4 取付M8ボルト、4本使用 12 4-φ9 62 30 10 53 130 この動作範囲内側限界よりも 内側ではZ軸ジャバラがベース に、または、アームがマシン ハーネスに当たりますので 動作させないでください。 00 ユーザ配管を使用しない場合は付属の埋栓をしてください。 ユーザ配管2(φ4赤) R5 ユーザ配管1(φ4黒) 1 小型単軸ロボット 212 TRANSERVO ユーザ配管4(φ4白) LCM100 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 4-M3x0.5 深さ 5 (R軸原点との位相関係なし) 配線配管クランプ用ですので 大きな負荷を付けないで ください。 中空径 φ1 リニアコンベアモジュール ユーザ配管3(φ4青) アプリケーション YK500XGLC ツールフランジ取付仕様 APPLICATION YK500XGLC YK500XC ロボット本体 ー RCX340-4 ー ー 小型単軸ロボット ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240 適用コントローラ ー ー R ー ー ー P.502 ー ー ー コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ 回転範囲(°) 1 繰り返し位置決め精度※( (R:°) XYZ:mm) Y軸 250 ±142 200 Z軸 200 ±0.02 最高速度(XYZ:m/sec) (R:°/sec) 4 .9 最大可搬質量(kg) R軸 ̶ ±360 200 ±0.01 1 .7 100 ±0.005 876 2 R軸許容慣性モーメント※( kgm2) ユーザ配線(sq×本) ユーザ配管(外径) 動作リミット設定 ロボットケーブル長(m) 本体質量(kg) クリーン度 RCX340 RCX240-R 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 1500 ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 加速度係数の設定に制限があります。 1cfあたり(0.1μmベース)、吸引ブロア使用時。 必要吸引量は使用状態・使用環境で異なります。 YK500XC 250 122.5 R2 70 94 110 65 63 ユーザ配管1 (φ6黒) 57 73 166(ベース寸法) 0 R25 4-φ11 取付M10ボルト使用 142° MAX 940 Z300mmストローク 142° 動作範囲 876 ° ° 42 667 122 741 R1 各種情報 Z200mmストローク 122 コントローラ CONTROLLER INFORMATION ユーザ配線用Dサブコネクタ (1-20番使用可能) ° クリーン CLEAN R1 120 0 ° 250 ユーザ配管2(φ6赤) ユーザ配管3(φ6青) R80 54.5 47 R軸ドグ旋回半径 120 YP-X ピック&プレイス 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 160 YK-XG スカラロボット 吸引量 (Nℓ/min)エアー 電源容量(VA) 65 XY-X 直交ロボット 10 0.53 0.12 0.2×20 φ6×3 1.ソフトリミット 2.メカストッパ(XYZ軸) 標準:3.5 オプション:5,10 31 CLASS 10※3 60※4 標準サイクルタイム:2kg 可搬時(sec) コントローラ ̶ 300 90 PHASER リニア単軸ロボット X軸 250 ±120 400 アーム長 (mm) モータ出力 AC(W) ※1. ※2. ※ 3. ※ 4. P.489 ■ 適用コントローラ R55 FLIP-X 単軸ロボット ■ 基本仕様 軸仕様 BB ー CE対応 ー 回生装置 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ 00 TRANSERVO 適用コントローラ / 制御軸数 ー Z軸ストローク ー ケーブル長 200:200mm 3L:3.5m 300:300mm 5L:5m 10L:10m ー R5 LCM100 リニアコンベアモジュール 注文型式 00 アプリケーション ● アーム長 500mm ● 最大可搬質量 10kg R5 APPLICATION YK500XC 50 R2 561 単軸 2x2-M4x0.7 深さ10(対面同様) 147° 147° X,Y軸メカストッパ位置 直交 363 36 スカラ 225.5±2 30 54 20 364 φ68 φ90 M4アース端子 ケーブルは可動させないでく ださい。 0 ベース背面にはメンテナンス上の十分な スペースを確保してください。 434 ユーザ配管1(φ6黒) ユーザ配管2(φ6赤) ユーザ配管3(φ6青) R27(ケーブル最小曲げ半径) M12x1.75 深さ10 300 200 282 φ18 -00.018 適用コントローラ RCX340 u 502 RCX240 u 489 4-φ9 91 48 15 0 73 55 35 0 ユーザ配線用 Dサブコネクタ (1-20番使用可能) 継手 ※1 (φ12x3本) 102 69 53 36 0 ※1. 配管方法は取扱説明書をご参照ください。 ー ー ー ー コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ ■ 基本仕様 ■ 適用コントローラ X軸 350 ±129 200 アーム長 (mm) 軸仕様 回転範囲(°) モータ出力 AC(W) Y軸 250 ±144 150 1 繰り返し位置決め精度※( (R:°) XYZ:mm) ±0.01 最高速度(XYZ:m/sec) (R:°/sec) 4.9 最大可搬質量(kg) 2 R軸許容慣性モーメント※( kgm2) ユーザ配線(sq×本) ユーザ配管(外径) 動作リミット設定 ロボットケーブル長(m) 本体質量(kg) クリーン度 吸引量(Nℓ/min)エアー ※1. ※2. ※3. ※4. ※5. ※6. Z軸 150 R軸 ̶ ±360 50 ±0.01 1 .1 100 ±0.004 1020 コントローラ 電源容量(VA) ̶ RCX340 RCX240S 4 0.74 0.05 0.2×10 φ4×4 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) 標準:3.5 オプション:5,10 26 クラスISO3(ISO14644-1)※4+ESD ※5 30※6 標準サイクルタイム:2kg 可搬時(sec) BB ー CE対応 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ P.489 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 1000 クリーン ー CLEAN 適用コントローラ ー P.502 YP-X ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240S ー ピック&プレイス ー YK-XG ー スカラロボット ー XY-X ー 直交ロボット ー PHASER 適用コントローラ / 制御軸数 ー Z軸ストローク ー ツールフランジ ー 中通しシャフト ー ケーブル長 無記入:なし 150:150mm S:あり 3L:3.5m F:あり 5L:5m 10L:10m ー リニア単軸ロボット RCX340-4 FLIP-X ー ー 単軸ロボット S ー 小型単軸ロボット ロボット本体 ー TRANSERVO ー LCM100 YK600XGLC 150 リニアコンベアモジュール 注文型式 アプリケーション ● アーム長 600mm ● 最大可搬質量 4kg APPLICATION YK600XGLC ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 ※ 精度良く基準座標を設定するには、基準座標設定治具(オプション) を使用して行ないます。詳細は取扱説明書(設置マニュアル)をご参照 ください。 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 上下移動25mm、水平移動300mmの往復動作時(粗位置決めアーチモーション)。 加速度係数の設定に制限があります。P.532をご参照ください。 クラス10(0.1μm)FED-STD-209D相当。 ESD仕様はオプション対応です。弊社営業までお問い合わせください。 必要吸引量は使用状態・使用環境で異なります。 YK600XGLC 4-M3x0.5 深さ 5 ユーザ配管4(φ4白) 90 ° 8 97° ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:146° アーム旋回時最大170 マシンハーネス 184 97° 675±10 アーム旋回時最大740 ユーザ配管1(φ4黒) ユーザ配管2(φ4赤) ユーザ配管を使用しない場合は付属の埋栓をしてください。 523 ユーザ配管4(φ4白) Z軸ジャバラ A 4 93 71 58 45 32 12 0 M4アース端子 10 6 31 98 61 32 0 22.5 26 φ70 断面図 A-A 28 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 39 39 10 10 中 空 50 70 20 ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に 含めてください。 10 10 径 φ 11 0 Z軸上昇端メカストッパ位置 Z軸原点復帰時、Z軸4mm上昇 Z軸下降端メカストッパ位置 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 φ38 42 256 221 202 167 4 150 A 吸引用継手φ12 ユーザ配管3(φ4青) 48 φ90 82.5 2面幅15 57 スカラ 0 51 43 直交 296 274 247 186 146 133 67.5±2 単軸 441 ユーザツール取付範囲 0 φ16 h7 - 0.018 R32(ケーブル最小曲げ半径) 4-φ11 Z軸先端形状 ケーブルは可動させないで ください。 適用コントローラ RCX340 u 502 RCX240S u 489 435 各種情報 702 674 627 R600 R20 12 183(ベース取付部寸法) 117 350 (150) 852 822 250 13.4 視図F コントローラ ↓F 取付M8ボルト、4本使用 この動作範囲内側限界よりも 内側では、アームがマシン ハーネスに当たりますので 動作させないでください。 CONTROLLER INFORMATION ユーザ配管2(φ4赤) 56 13.4 4-φ9 62 30 10 53 130 ° 9° ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 144 ° 144 12 104 60 60 140 7.8 96 212 (R軸原点との位相関係なし) 配線配管クランプ用ですので 大きな負荷を付けないで ください。 中空径 φ11 7.8 129 ユーザ配線用コネクタ (1∼10番使用可能、 ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 R250 ユーザ配管3(φ4青) YK-XG スカラロボット YP-X ピック&プレイス 9° コントローラ 13.4 視図F R600 この動作範囲内側限界よりも 内側では、アームがマシン ハーネスに当たりますので 動作させないでください。 8 R20 12 183(ベース取付部寸法) 184 97° 各種情報 97° ・上記動作範囲でベースフランジ部、ロボットケーブルとスプライン、 ジャバラ、ツールフランジが干渉する位置は使用できませんので 注意ください。 ・X軸メカストッパ位置:131° ・Y軸メカストッパ位置:146° マシンハーネス ユーザ配管1(φ4黒) ユーザ配管2(φ4赤) ユーザ配管を使用しない場合は付属の埋栓をしてください。 ユーザ配管4(φ4白) 2 0 φ30 h7 - 0.021 φ55 詳細図 D + 0.012 φ4 H7 0 通し 視図E 90° 150 39 39 10 10 ↑E .6 RCX340 u 502 RCX240S u 489 22 適用コントローラ ケーブルは可動させないで ください。 11 ベース背面にはメンテナンス上の 十分なスペースを確保してください。 4-φ11 .6 22 436 R32(ケーブル最小曲げ半径) φ35 2 0.0 ユーザ用タップ 6-M3x0.5 深さ 6 ここに付くツール質量は先端質量に 含めてください。 31 .6± 28 6 22 50 70 20 10 径φ M4アース端子 98 61 32 0 22.5 26 中空 スカラ 86.5 D 22 .6 直交 93 71 58 45 32 12 0 Z軸ジャバラ 78 63.5±2 0 ユーザ配線用コネクタ (1∼10番使用可能、ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 7± 0 22 .02 .6 単軸 吸引用継手φ12 ユーザ配管3(φ4青) 4 CONTROLLER INFORMATION 取付M8ボルト、4本使用 ° 12 クリーン CLEAN ユーザ配管2(φ4赤) 13.4 4-φ9 62 30 10 53 130 144 ° 144 R250 XY-X 直交ロボット ユーザ配管1(φ4黒) ユーザ配管を使用しない場合は付属の埋栓をしてください。 9° PHASER リニア単軸ロボット 7.8 FLIP-X 単軸ロボット 212 12 小型単軸ロボット ユーザ配管4(φ4白) (R軸原点との位相関係なし) 配線配管クランプ用ですので 大きな負荷を付けないで ください。 中空径 φ11 7.8 TRANSERVO ユーザ配線用コネクタ (1∼10番使用可能、 ケーブルクランプサイズφ13.1∼15) 使用しない場合は付属のキャップをかぶせてください。 104 60 60 140 LCM100 リニアコンベアモジュール 4-M3x0.5 深さ 5 ユーザ配管3(φ4青) 96 アプリケーション YK600XGLC ツールフランジ取付仕様 90 APPLICATION YK600XGLC ー ー ー ー CE対応 ー 回生装置 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ ■ 基本仕様 軸仕様 P.489 ■ 適用コントローラ X軸 350 ±120 400 アーム長 (mm) 回転範囲(°) モータ出力 AC(W) 1 繰り返し位置決め精度※( (R:°) XYZ:mm) Y軸 250 ±145 200 Z軸 200 ±0.02 最高速度(XYZ:m/sec) (R:°/sec) 5.6 最大可搬質量(kg) R軸 コントローラ 2 R軸許容慣性モーメント※( kgm2) ユーザ配線(sq×本) ユーザ配管(外径) 動作リミット設定 ロボットケーブル長(m) 本体質量(kg) クリーン度 吸引量(Nℓ/min)エアー 電源容量(VA) ̶ 300 ̶ ±360 200 ±0.01 1 .7 100 ±0.005 876 RCX340 RCX240-R 10 0.56 0.12 0.2×20 φ6×3 1.ソフトリミット 2.メカストッパ(XYZ軸) 標準:3.5 オプション:5,10 33 CLASS 10※3 60※4 標準サイクルタイム:2kg 可搬時(sec) ※1. ※2. ※3. ※4. BB ー 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 1500 ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 加速度係数の設定に制限があります。 1cfあたり(0.1μmベース)、吸引ブロア使用時。 必要吸引量は使用状態・使用環境で異なります。 YK600XC 122.5 110 65 160 65 94 70 50 R2 145° MAX 動作範囲 940 Z300mmストローク 145° 00 R6 122 667.5 50 R2 560.9 147° 継手 ※1 (φ12x3本) 30 282 M4アース端子 φ18 -00.018 ユーザ配管1(φ6黒) ユーザ配管2(φ6赤) ユーザ配管3(φ6青) R27(ケーブル最小曲げ半径) ケーブルは可動させないでく ださい。 M12x1.75 深さ10 91 300 φ68 φ90 スカラ 200 ユーザ配線用Dサブコネクタ (1-20番使用可能) 364 225.5±2 147° X,Y軸メカストッパ位置 48 0 ベース背面にはメンテナンス上の十分な スペースを確保してください。 適用コントローラ 4-φ9 15 0 直交 363 20 36 54 単軸 2x2-M4x0.7 深さ10(対面同様) 73 55 35 0 102 69 53 36 0 ※1. 配管方法は取扱説明書をご参照ください。 RCX340 u 502 RCX240 u 489 437 各種情報 96 R1 741 ° Z200mmストローク 122 ° 876 コントローラ 4-φ11 取付M10ボルト使用 CONTROLLER INFORMATION 57 73 166(ベース寸法) ° ユーザ配管1(φ6黒) 04 ユーザ配線用Dサブコネクタ (1-20番使用可能) 00 R6 R2 90 0 120 R2 ° 350 120 250 ユーザ配管2(φ6赤) ユーザ配管3(φ6青) R55 54.5 47 R80 R軸ドグ旋回半径 クリーン ー CLEAN R YP-X ー ピック&プレイス 適用コントローラ ー P.502 YK-XG ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240 ー スカラロボット ー XY-X ー 直交ロボット ー PHASER ー リニア単軸ロボット ー FLIP-X 適用コントローラ / 制御軸数 ー Z軸ストローク ー ケーブル長 200:200mm 3L:3.5m 300:300mm 5L:5m 10L:10m ー 単軸ロボット RCX340-4 小型単軸ロボット ー ー TRANSERVO ロボット本体 ー LCM100 YK600XC リニアコンベアモジュール 注文型式 アプリケーション ● アーム長 600mm ● 最大可搬質量 10kg APPLICATION YK600XC APPLICATION アプリケーション LCM100 リニアコンベアモジュール YK700XC ● アーム長 700mm ● 最大可搬質量 20kg 注文型式 YK700XC ロボット本体 ー ー ー RCX340-4 小型単軸ロボット TRANSERVO 適用コントローラ / 制御軸数 ー Z軸ストローク ー ケーブル長 200:200mm 3L:3.5m 400:400mm 5L:5m 10L:10m ー ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240 適用コントローラ ー ー ー R ー ー P.502 ー ー ー CE対応 ー 回生装置 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ 回転範囲(°) 1 繰り返し位置決め精度※( (R:°) XYZ:mm) Y軸 350 ±145 400 Z軸 200 ±0.02 最高速度(XYZ:m/sec) (R:°/sec) 6 .7 最大可搬質量(kg) R軸 コントローラ ̶ ±360 400 ±0.01 1 .7 200 ±0.005 600 RCX340 RCX240-R 3 R軸許容慣性モーメント※( kgm2) ユーザ配線(sq×本) ユーザ配管(外径) 動作リミット設定 ロボットケーブル長(m) 本体質量(kg) クリーン度 2000 ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 加速度係数の設定に制限があります。 1cfあたり(0.1μmベース)、吸引ブロア使用時。 必要吸引量は使用状態・使用環境で異なります。 YK700XC 350 6 350 147 126 10 R700 70 106 80 93 4-φ14 取付M12ボルト使用 145° MAX 1020 956 00 R3 50 99 683 ° R1 123 756 Z200mmストローク 123 各種情報 ° Z400mmストローク 145° 動作範囲 R7 R76 R5 R軸ドグ旋回半径 R350 コントローラ CONTROLLER INFORMATION 9.5 75 106 R2 ° R150 120 クリーン CLEAN 58 ユーザ配線用 Dサブコネクタ (1-20番使用可能) R10 ユーザ配管1(φ6黒) ユーザ配管2(φ6赤) ユーザ配管3(φ6青) ° YP-X ピック&プレイス 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 120 YK-XG スカラロボット 吸引量 (Nℓ/min)エアー 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 75 XY-X 直交ロボット 20 0.57 0.32 0.2×20 φ6×3 1.ソフトリミット 2.メカストッパ(XYZ軸) 標準:3.5 オプション:5,10 57 CLASS 10※4 60※5 2 標準サイクルタイム:2kg 可搬時※( sec) 電源容量(VA) ̶ 400 180 PHASER リニア単軸ロボット X軸 350 ±120 800 アーム長 (mm) モータ出力 AC(W) ※1. ※2. ※ 3. ※ 4. P.489 ■ 適用コントローラ 70 112 FLIP-X 単軸ロボット ■ 基本仕様 軸仕様 BB ー 単軸 586 147° 直交 54 119.5 200 (174) 適用コントローラ 20 0 RCX340 u 502 RCX240 u 489 4-φ9 継手 ※1 (φ12x2本) 180 140 97 M12x1.75 深さ10 ベース背面にはメンテナンス上の十分なスペース を確保してください。 438 279 曲げ半径)ケーブル は可動させないで ください。 0 φ22 -0.021 φ90 400 0 R27(ケーブル最小 18 スカラ 226±2 35 376 147° X、Yメカストッパー位置 377 M4アース端子 継手 ※1(φ12) 0 ユーザ配管1(φ6黒) ユーザ配管2(φ6赤) ユーザ配管3(φ6青) 180 160 140 59 0 ユーザ配線用Dサブコネクタ (1-20番使用可能) ※1. 配管方法は取扱説明書をご参照ください。 ー ー ー ー ー コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ ■ 基本仕様 X軸 450 ±120 800 回転範囲(°) モータ出力 AC(W) 1 繰り返し位置決め精度※( (R:°) XYZ:mm) Y軸 350 ±145 400 Z軸 200 ±0.02 最高速度(XYZ:m/sec) (R:°/sec) 7.3 最大可搬質量(kg) R軸 コントローラ 2 R軸許容慣性モーメント※( kgm2) ユーザ配線(sq×本) ユーザ配管(外径) 動作リミット設定 ロボットケーブル長(m) 本体質量(kg) クリーン度 吸引量(Nℓ/min)エアー 電源容量(VA) ̶ 400 ̶ ±360 400 ±0.01 1 .7 200 ±0.005 600 RCX340 RCX240-R 20 0.57 0.32 0.2×20 φ6×3 1.ソフトリミット 2.メカストッパ(XYZ軸) 標準:3.5 オプション:5,10 58 CLASS 10※3 60※4 標準サイクルタイム:2kg 可搬時(sec) ※1. ※2. ※3. ※4. P.489 ■ 適用コントローラ アーム長 (mm) 軸仕様 BB ー CE対応 ー 回生装置 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ 2000 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 加速度係数の設定に制限があります。 1cfあたり(0.1μmベース)、吸引ブロア使用時。 必要吸引量は使用状態・使用環境で異なります。 YK800XC 126 R8 75 59 180 70 112 00 R2 0 R76 R5 70 106 80 93 R35 4-φ14 取付M12ボルト使用 MAX1020 956 145° 145° 動作範囲 Z400mm 123 47 683 50 147° 曲げ半径)ケーブル は可動させないでく ださい。 97 54 119.5 20 0 18 0 M12x1.75 深さ10 35 400 200 φ90 ベース背面にはメンテナンス上の十分なスペース を確保してください。 4-φ9 継手 ※1 (φ12x2本) 180 140 R27(ケーブル最小 M4アース端子 継手 ※1 (φ12) 0 ユーザ配管1(φ6黒) ユーザ配管2(φ6赤) ユーザ配管3(φ6青) スカラ 0 φ22 -0.021 直交 279 226±2 147° X,Yメカストッパー位置 377 376 単軸 R3 586 180 160 140 59 0 ユーザ配線用Dサブコネクタ (1-20番使用可能) ※1. 配管方法は取扱説明書をご参照ください。 (174) 適用コントローラ RCX340 u 502 RCX240 u 489 439 各種情報 00 R8 R2 ° 756 Z200mm ストローク 123 ° ストローク コントローラ R軸ドグ旋回半径 CONTROLLER INFORMATION 9.5 75 106 R150 ° 120 ° 147 120 6 350 ユーザ配線用 Dサブコネクタ (1-20番使用可能) 450 R10 58 ユーザ配管1(φ6黒) ユーザ配管2(φ6赤) ユーザ配管3(φ6青) クリーン R CLEAN ー YP-X 適用コントローラ ー P.502 ピック&プレイス ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240 ー YK-XG ー スカラロボット ー XY-X ー 直交ロボット ー PHASER ー リニア単軸ロボット 適用コントローラ / 制御軸数 ー FLIP-X RCX340-4 単軸ロボット ー Z軸ストローク ー ケーブル長 200:200mm 3L:3.5m 400:400mm 5L:5m 10L:10m ー 小型単軸ロボット ー TRANSERVO ロボット本体 ー LCM100 YK800XC リニアコンベアモジュール 注文型式 アプリケーション ● アーム長 800mm ● 最大可搬質量 20kg APPLICATION YK800XC APPLICATION アプリケーション LCM100 リニアコンベアモジュール YK1000XC ● アーム長 1000mm ● 最大可搬質量 20kg 注文型式 YK1000XC ロボット本体 ー ー ー 小型単軸ロボット 適用コントローラ / 制御軸数 ー ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240 適用コントローラ ー ー ー R ー ー P.502 ー ー コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ P.489 回転範囲(°) 1 繰り返し位置決め精度※( (R:°) XYZ:mm) Y軸 450 ±145 400 Z軸 200 ±0.02 最高速度(XYZ:m/sec) (R:°/sec) 8 .0 最大可搬質量(kg) R軸 コントローラ ̶ ±360 400 ±0.01 1.7 200 ±0.005 600 RCX340 RCX240-R 2 R軸許容慣性モーメント※( kgm2) ユーザ配線(sq×本) ユーザ配管(外径) 動作リミット設定 ロボットケーブル長(m) 本体質量(kg) クリーン度 ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 http://www.yamaha-motor.co.jp/robot/ 周囲温度一定時の値です(X、Y軸)。 加速度係数の設定に制限があります。 1cfあたり(0.1μmベース)、吸引ブロア使用時。 必要吸引量は使用状態・使用環境で異なります。 YK1000XC ユーザ配線用 Dサブコネクタ 147 126 R3 0 00 15 R1 50 75 R76 9.5 R5 コントローラ 70 106 80 93 R4 4-φ14 取付M12ボルト使用 MAX1020 956 145° 145° R3 動作範囲 Z400mm ストローク 00 00 123 671 ° Z200mm ストローク 0 ° 756 123 各種情報 CONTROLLER INFORMATION R軸ドグ旋回半径 ° R150 106 120 450 6 (1-20番使用可能) 550 R10 クリーン CLEAN 58 ユーザ配管1(φ6黒) ユーザ配管2(φ6赤) ユーザ配管3(φ6青) ° YP-X ピック&プレイス 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 120 YK-XG スカラロボット 吸引量 (Nℓ/min)エアー 2000 運転方法 プログラム ポイントトレース リモートコマンド オンライン命令 ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 75 XY-X 直交ロボット 20 0.60 0.32 0.2×20 φ6×3 1.ソフトリミット 2.メカストッパ(XYZ軸) 標準:3.5 オプション:5,10 59 CLASS 10※3 60※4 標準サイクルタイム:2kg 可搬時(sec) 電源容量(VA) ̶ 400 180 PHASER リニア単軸ロボット X軸 550 ±120 800 アーム長 (mm) 70 112 FLIP-X 単軸ロボット ■ 適用コントローラ モータ出力 AC(W) ※1. ※2. ※ 3. ※ 4. BB ー CE対応 ー 回生装置 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ ■ 基本仕様 軸仕様 ー R1 TRANSERVO ー Z軸ストローク ー ケーブル長 200:200mm 3L:3.5m 400:400mm 5L:5m 10L:10m RCX340-4 , 0 M12x1.75 深さ10 50 継手 ※1 (φ12x2本) 180 140 97 M4アース端子 54 119.5 ベース背面にはメンテナンス上の十分な スペースを確保してください。 (174) 440 279 最小曲げ半径) ケーブルは可 動させないで ください。 400 200 φ90 R27(ケーブル φ22 -00.021 適用コントローラ RCX340 u 502 RCX240 u 489 20 0 18 スカラ 226±2 147° 最大動作範囲 147° 377 35 直交 376 R4 単軸 586 4-φ9 0 継手 ※1(φ12) ユーザ配管1(φ6黒) ユーザ配管2(φ6赤) ユーザ配管3(φ6青) 180 160 140 59 0 ユーザ配線用Dサブコネクタ (1-20番使用可能) ※1. 配管方法は取扱説明書をご参照ください。
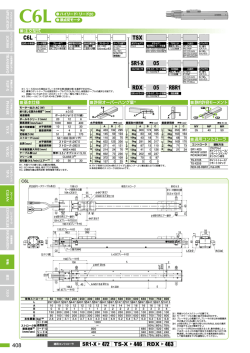
© Copyright 2024