
ロボット教材を用いた 障害物検知・回避システムの試作;pdf
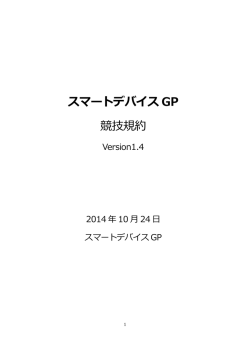
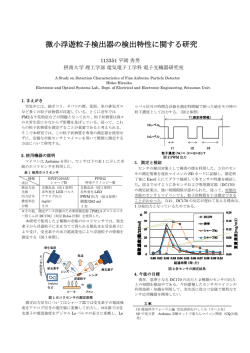
ロボット教材を用いた 障害物検知・回避システムの試作 摂南大学 113007 稲継 康浩 理工学部 電気電子工学科 電子光機器研究室 Prototype of Obstacle Detection and Avoidance System using Educational Robot Block-Materials Yasuhiro Inatsugu Electronic and Optical Systems Lab., Dept. of Electrical and Electronic Engineering, Setsunan Univ. 1.まえがき 自動で動くロボットや AEBS(自動ブレーキ)を搭載した “ぶつからない車”が話題になっていてその多くは便利 なものである。例えば、災害などで人が入っていけない 場所にロボットを向かわせてその場所の様子を確認する 3.3サウンドセンサ 周りの音量の強弱を計測する。計測には dB(標準デシ ベル)単位と dBA(人間の聴覚で重みづけした音圧レベル) 単位がある。dB は人間が聞き取れない音を含めた全ての 音で、dBA は人間が聞き取ることが出来る音である。 などである。そこで、自分でも少しでも近いものを作っ てみたいと考えた。今回は LEGO MINDSTORMS を用い て障害物を回避する移動ロボットを製作することにした。 2.概要 車体の前方に取り付 けた超音波センサによ って、物体との距離を 検知する。物体を検知 すると車は一度停止す る。超音波センサには モータを取り付けてお り、左右に回るように なっている。車体は物 体が目の前に現れるま で前進する。物体が現 れると一時停止し左右 に何もないか確認する。 障害物がなければどち らかに旋回するが、前 と左右に物体がある場 合はその場で U ター ンする。なおプログラ ム の 実 装 は 「 Lab VIEW 2013 SP1」を 使用している。 3.使用したセンサ 図 2 実験機とセンサ 4.実験について 図3のようなコースを作製し実際に走行実験を行った。 コースの幅は約50cm 程度で、図の矢印のように進むのが 目標である。結果は50回に32回成功した。失敗したとき は、矢印のようには進むものの同じ場所で回ったり、途 中で帰ってきてしまった。一方でセンサについては、よ く反応していた。走行中に部屋の明るさを変化させたり、 近くで手を叩いてみた結果、それぞれ速度に変化があっ たり一時停止した。 図 1 障害物検知の流れ 3.1超音波センサ 超音波を発信し、その反響音を読み取り距離を測定す る。片方が送信側で、もう片方が受信側になっている。 距離の測定範囲はおよそ1cm~250cm 程度、測定角度は 約20度になっている。 3.2光センサ 光センサは、明暗の区別・室内の光量測定・着色表面 の明るさの測定を行うことが出来る。このセンサにはア クティブモードとパッシブモードの2つのモードがあり、 アクティブモードは光を発し、反射光を測定する。一方 パッシブモードでは光を発せず、周囲の光を測定する。 図 3 実験コース 文献 1. 三島健太 著 LEGOMindstorms NXT 入門 2. LEGO 情報 http://www.afrel.co.jp/lineup/nxt


© Copyright 2026