
発表スライド
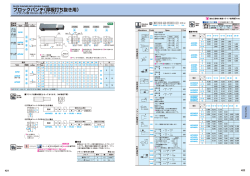
模型桁実験による車両応答を用いた モード形状推定法の 桁損傷検知への適用性に関する検討 APPLICATION OF MODE SHAPE ESTIMATION EMPLOYED VEHICLE RESPONSE TO GIRDER DAMAGE DETECTION IN MODEL EXPERIMENT 工学システム学類4年次 中釜 裕太 (Yuta NAKAGAMA) 指導教員 システム情報系助教 山本 亨輔 (Kyosuke YAMAMOTO) 研究背景 Background of this study 車上計測 損傷検知 On-going Measuring 11000mm Damage Detection 25t トラック 5460mm 5460mm 5460mm 5460mm 5460mm 5460mm 5460mm 5460mm 5460mm 5460mm 5460mm 5460mm 65520mm モード形状 Mode shape 減衰 固有振動数 Damping Natural frequency 車上計測により得られた振動応答データ ① 基底関数を用いて空間的に補正 ※ 旧鳥飼大橋(トラス橋)における実車走行実験の様子 ② 特異値分解によりモード形状推定 特異値分解 Singular value decomposition 𝐐𝐓 𝐐 = 𝐝𝐢𝐚𝐠(𝝈𝟏 … 𝝈𝒏 ) 無相関性 De-correlation 𝐘 = 橋梁振動 Bridge vibration Φ21 Φ11 𝐀 𝐐 モード形状 基準座標 直交行列 Mode shape 対角行列 Reference coordinate Orthogonal matrix Diagonal matrix (𝐀𝐀𝐓 = 𝐈) 一次モード形状 First mode shape 𝐔 = Φ21 𝐘 = Bridge vibration on vehicle’s position 二次モード形状 𝐕 直交行列 Orthogonal matrix 𝐓 (𝐔𝐔𝐓 = 𝐈) (𝚺 = 𝐝𝐢𝐚𝐠(𝝈𝟏 … 𝝈𝒏 )) (𝐕𝐕 = 𝐈) 移動上橋梁振動 Φ22 𝚺 𝐓 𝚽 𝐐 モード形状 基準座標 Mode shape Reference coordinate (𝚽𝚽 𝐓 ≠ 𝐈) Second mode shape 特異値分解の適用不可 基底関数 Basis function 𝒚 𝑡 → 𝒛 𝑡 𝑎1 𝑁1 + 𝑎2 𝑁2 𝑎1 𝑎2 車上振動 Vehicle vibration 𝜙(𝑥) 車両パラメータ変化 Change of vehicle parameter 𝑁1 + 𝑁2 = 1 𝑁2 𝑁1 路面変化 基底関数 𝐍= Change of road unevenness 𝑁1 (𝑥1 ) 𝑁2 (𝑥1 ) 𝑁1 (𝑥2 ) 𝑁2 (𝑥2 ) 𝐐 近似区間 𝜙1 (𝑥1 ) 𝜙2 (𝑥1 ) 𝑁1 (𝑥1 ) 𝑁2 (𝑥1 ) 𝑎11 = 𝜙1 (𝑥2 ) 𝜙2 (𝑥2 ) 𝑁1 (𝑥2 ) 𝑁2 (𝑥2 ) 𝑎21 𝐍−𝟏 (𝑡)𝒚 𝑡 = 𝐀𝒒(t) 𝐓 (𝐀𝐀 = 𝐈) 特異値分解の適用可 𝑎12 𝑎22 相関性 𝐐𝐓 → ≠ 𝐝𝐢𝐚𝐠(𝝈𝟏 … 𝝈𝒏 ) 特異値分解の推定精度に影響 Correlation affects on estimation accuracy ※ 特異値分解により正確にモード形状 を推定することは不可 モード形状推定法による損傷評価 〇 健全時(0) 〇 損傷時(1) 推定 モード形状 (1) 𝑞𝑗 (0) 𝑎𝑖𝑗 △𝑎 無相関性 De-correlation (1) 𝑎𝑖𝑗 28 (1) 𝑢𝑖𝑗 (0) 𝑢𝑖𝑗 〇 損傷時 29 △ 𝑞 +△ 𝑎 推定 (0) (1) 𝑠𝑗 = 𝑠𝑗 〇 健全時 30 損傷影響 Damage influence Angle of mode shape △𝑞 (0) 𝑞𝑗 𝑖:橋梁上の計測位置 𝑗:モード次数 モード形状角度 基準座標 Damage evaluating 27 26 25 24 23 22 21 走行速度の変化による特異値分解の推定精度のばらつき Change of estimation accuracy on singular value decomposition by run speed 模型実験による統計データの収集 Model experiment for statistical data acquisition 20 10 20 Vehicle run speed [km/h] 走行速度(km/h) 40 研究目的 Purpose of this study □ モード形状推定法の損傷検知への適用性を検討 ① 走行速度の変化による推定精度のばらつきを損傷影響と比較 特異値分解の条件設定の変化 ② 推定モード形状・基準座標による損傷評価 外的影響と損傷影響の区別 □ 反復実験が可能な模型実験により統計的分析を行う 模型実験 Model experiment 剛性低下による損傷模擬 Stiffness reduction for simulated damage CH1 CH3 5200 715 進行方向 CH4 1040 センサー レール レール除去部 アプローチ部 ワイヤー 60 100 アプローチ部 ピン支承 3 Displacement CH2 180 180 500 ピン支承 路面凹凸 Road unevennessunit : mm 2 1 0 -1 -2 0 模型桁 Girder model 走行レール 1000 2000 3000 Position 模型車両 Vehicle model 加速度計 損傷用レール 遮光板 ピン支承 4000 5000 推定モード形状 Estimation mode shape Probability JB検定の結果と統計量 Histogram Normal distribution 0.2 0.1 頻度確率 Intact Probability 0 0.7 0.2 0.75 0.8 0.85 0.9 0.95 Histogram Normal distribution 0.1 Damage 0 0.7 0.75 0.8 0.85 SSMA [rad] 0.9 0.95 モード形状角度 ※ モード形状角度は正規分布に従う傾向 Intact Damage Mean (× 10−1 ) 8.05 8.53 Variance (× 10−4 ) Skewness (× 10−3 ) Kurtosis 4.17 3.96 -9.47 1.68 3.11 3.11 JB (× 10−2 ) 7.70 7.17 Pr( 𝜒 2 ≥ 𝜒02 ) 0.962 0.965 Determination n.s. n.s. n.s. 非有意 , s 有意 (有意水準 5%) 推定モード形状 0.95 SSMA [rad] モード形状角度 0.9 Estimation mode shape ウェルチの t 検定の結果 Average (Damage) 自由度 T 1.66 × 10−58 Determination s Pr T ≥ 𝑡0 0.85 0.8 0.75 0.7 9 295 -20.5 n.s. 非有意 , s 有意 (有意水準 0.1%) Average (Intact) 9.5 10 10.5 Run speed [rpm] 走行速度 損傷変化 ≫ 推定精度のばらつき 11 ※ モード形状は損傷前後で有意に異なる 推定基準座標 Estimation reference coordinate JB検定とKS検定の結果 Probability 0.4 0.3 Histogram Normal distribution JB 0.2 Pr(𝜒 2 ≥ 𝜒02 ) Determination 0.1 Intact 頻度確率 0 4 4.5 5 5.5 6 6.5 7 7.5 Probability s KS 1.09 Pr(𝜒 2 ≥ 𝜒02 ) 0.581 Determination n.s. Histogram Normal distribution 0.2 0.1 n.s. 非有意 , s 有意 (有意水準 5%) Damage 0 4 n.s. 8 0.4 0.3 Intact Damage 6.01 × 10−2 7.41 0.97 2.45 × 10−2 4.5 5 5.5 6 6.5 7 Kurtosis of reference coordinate 推定基準座標の尖度 7.5 8 ※ 基準座標は損傷前後で有意な差なし 損傷影響 ≫ 外的影響 結果の考察 Result of considerations □ 損傷前後でのモード形状の有意な差を確認 損傷影響 ≫ 推定精度のばらつき □ 損傷前後での基準座標に有意差なし 損傷前後でのモード形状変化は損傷影響である可能性が高い □ 今後の課題 健全時における計測値の再現性 実橋梁実験に拡張したとき、高い推定精度が必要 まとめ Conclusion □ モード形状推定法の損傷検知への適用性を検討 ・模型実験による統計データの収集 ・走行速度変化による推定精度のばらつきを考慮 ・推定モード形状・基準座標による損傷評価 □ 統計分析により損傷前後での変化を検証 推定モード形状 → 有意差あり 推定基準座標 → 有意差なし 損傷前後での変化は損傷影響の可能性が高い

© Copyright 2026