
フィードバック制御入門第2章 1
フィードバック制御入門 第2章
第2章 ダイナミカルシステムの表現
第2章 ダイナミカルシステムの表現
2.1 ダイナミカルシステム
2.2 伝達関数
2.2 伝達関数
2.3 ブロック線図
キーワード : ダイナミカルシステム, システムの線形化,
伝達関数
キーワード : 伝達関数, ブロック線図, 等価変換
学習目標 : 入出力を動的に関係づけるダイナミカル
システムとシステムの線形化の概念を理解する.そし
て,伝達関数表現の利点を理解して,様々なシステム
に対する伝達関数の導出方法を習得する.
学習目標 :様々なシステムに対する伝達関数の導出
方法を習得する.また,伝達関数で表された要素の結
合と信号の流れのようすを,ブロック線図により表す方
法を習得する.
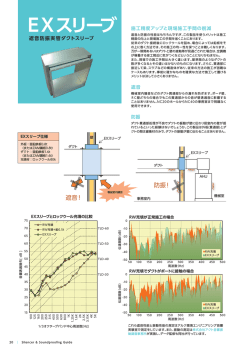
2. ダイナミカルシステムの表現
[ 例 2.1 ]
ばね系
2.1 ダイナミカルシステム
ばね定数 K [ N / m]
線形ダイナミカルシステム
(入力)ー(出力):因果関係
(入力)力
自然科学 / 工学の法則
K
f (t ) [ N]
(出力)ばねの伸び x(t ) [m]
(運動系) ニュートンの運動の法則
フックの法則
(回路系) キルヒホッフの法則
1
f (t )
K
( f (t ) = Kx(t ))
図 2.2 ばね系
x(t ) =
入力
u (t )
ダイナミカル
システム
x(t )
f (t )
出力
y (t )
図 2.1 ダイナミカルシステム
[ 例 2.2 ]
静的システム
時刻 t = t0 の出力 y (t0 ) は当該時刻の入力 u (t0 ) だけから
一意に定まり,入力の過去の履歴 {u (t ) : 0 ≤ t < t0 } に無関係
x(t ) =
1
f (t )
K
K
質量ーばねーダンパ系
質量 M [kg ]
ばね定数 K [ N/m]
(入力)力 f (t ) [ N ]
x(t )
f (t )
(出力)変位 x(t ) [m]
粘性摩擦係数 D [ N ⋅ s/m ]
M
d 2 x(t )
dx(t )
= f (t ) − Kx(t ) − D
dt 2
dt
M
d 2 x(t )
dx(t )
+D
+ Kx (t ) = f (t )
dt
dt 2
ダイナミカルシステム(動的システム)
現在時刻の出力 y (t0 ) は入力の現在時刻の値 u (t0 ) だけ
でなく過去の履歴にも依存
x (t )
K
f (t )
D
M
図 2.3 質量ーばねーダンパ系
2階の微分方程式
1
フィードバック制御入門 第2章
[ 例 2.3 ]
システム的アプローチ
RLC 回路
d 2eo (t )
de (t )
LC
+ RC o + eo = ei
2
dt
dt
R
1’
2階の微分方程式
a2
y :出力
d 2 y (t )
dy (t )
+ a1
+ a0 y (t ) = b0u (t )
dt 2
dt
u :入力
a0 ~ a2 , b0 :定係数
(初期値 = 0 で)
L
t
y (t ) = ∫ g (t − τ )u (τ )dτ
2’
0
dy (t )
例えば,a2 = a0 = 0 ,a1 = b0 = 1 のとき dt = u より
i (t )
ei (t )
eo (t )
C
t
y (t ) = ∫ u (τ )dτ
(初期値 = 0 )
0
ダイナミカルシステムの基本表現 (微分方程式)
1
2
図 2.4 RLC回路
an
dny
d n −1 y
dy
+ an −1 n −1 + L + a1 + a0 y
dt n
dt
dt
d mu
d m −1u
du
= bm m + bm −1 m −1 + L + b1
+ b0u
dt
dt
dt
システムの線形化
線形システム
[ 例 2.4 ]
入力 u1 (t )
水位系
出力 y1 (t )
システム
入力 u2 (t )
qo
断面積 A
出力 y2 (t )
傾き:
qi (t )
k
2 h0
qo = k h
qo 0
重ね合わせの原理
α1u1 + α 2u2
線形
システム
(u1 + u2 )
[ 例 2.12 ] 磁気浮上系
α1 y1 + α 2 y2
qo (t )
h(t )
h0
図 2.5 水位系
h
図 2.6 線形化
( y1 + y2 )
2.2 伝達関数
i0 + δ i (t )
微分方程式表現の問題点
e0 + δ e(t )
電磁石
[ 例 2.5 ] システムの結合(微分方程式)
L, R
x0 + δ x(t )
d 2 y1
dy
du
+ 2 1 + 3 y1 = 1 + u1
dt 2
dt
dt
d 2 y2
dy
dy
+ 3 2 + 3 y2 = 2 1 + y1
dt 2
dt
dt
f m (t )
鉄球
u1
y1
Mg
伝達関数
図 2.9 磁気浮上系
=
y2
結合
出力のラプラス変換
入力のラプラス変換
(すべての初期値 = 0 )
2
フィードバック制御入門 第2章
an
dny
d n −1 y
dy
d mu
d m−1u
du
+ an −1 n −1 + L + a1 + a0 y = bm m + bm −1 m−1 + L + b1
+ b0u
dt n
dt
dt
dt
dt
dt
G (s ) =
「 s をかける」
「微分する」
Y ( s) = L[ y (t )]
Y (s)
の定義より Y ( s ) = G ( s )U ( s )
U (s)
伝達関数
U ( s) = L[u (t )]
入力
U (s )
an s nY ( s ) + an −1s n −1Y ( s ) + L + a1sY ( s ) + a0Y ( s )
= bm s mU ( s ) + bm−1s m −1U ( s ) + L + b1sU ( s ) + b0U ( s )
n
(an s + an −1s
n −1
+ L + a1s + a0 )Y ( s )
G (s ) =
図 2.7 伝達関数
Y ( s)
2s + 1
Y1 ( s)
s +1
=
=
, 2
U1 ( s) s 2 + 2 s + 3 Y1 ( s) s 2 + 3s + 1
m −1
Y ( s)
b s + bm −1s + L + b1s + b0
= m n
U (s)
an s + an −1s n −1 + L + a1s + a0
伝達関数
=
伝達関数
出力のラプラス変換
入力のラプラス変換
Y ( s) Y ( s )
Y2 ( s )
s +1
2s + 1
= 2 ⋅ 1
= 2
⋅
U1 ( s)
Y1 ( s ) U 1 ( s)
s + 3s + 1 s 2 + 2s + 3
[ 例 2.7 ]
微分
乗算
sの
ダイナミクス
x(t ) =
除算
積分
ばね系
⎡ df (t ) ⎤
L⎢
⎥ = sF ( s ) − f (0)
⎣ dt ⎦
X (s) =
∫
G(s) =
[ 例 2.10 ]
ei (t ) :入力
M
1’
R
2’
(すべての初期値 = 0)
i (t )
ei (t )
2
Eo ( s )
1
=
Ei ( s ) RCs + 1
出力のラプラス変換
入力のラプラス変換
f (t ) :入力
x(t ) :出力
x(t )
K
f (t )
(すべての初期値 = 0)
Ms X ( s ) + DsX ( s ) + KX ( s ) = F ( s )
1
=
X ( s) = L[ x(t )]
F ( s) = L[ f (t )]
2
図 2.8 RC回路
G( s) =
伝達関数
d x(t )
dx(t )
+D
+ Kx (t ) = f (t )
dt 2
dt
eo (t )
C
RCsEo ( s) + Eo ( s) = Ei ( s )
伝達関数 G (s )
X (s) 1
=
F (s) K
質量ーばねーダンパ系
ラプラス変換
Eo ( s ) = L[eo (t )]
( RCs + 1) Eo ( s ) = Ei ( s )
図 2.2 ばね系
2
eo (t ) :出力
Ei ( s ) = L[ei (t )]
ラプラス変換
f (t )
1
F (s)
K
システムの結合(分離)の表現にメリット
deo (t )
+ eo (t ) = ei (t )
dt
x(t )
伝達関数 G (s )
加減乗除の代数的演算のみでよい
RC
K
F ( s ) = L[ f (t )]
X ( s ) = L[ x(t )]
⎡ t
⎤ 1
L ⎢ f (τ ) dτ ⎥ = F ( s )
⎣0
⎦ s
RC 回路
f (t ) :入力
x(t ) :出力
1
f (t )
K
ラプラス変換
[ 例 2.9 ]
Y (s )
[ 例 2.6 ] システムの結合(伝達関数)
= (bm s m + bm −1s m −1 + L + b1s + b0 )U ( s )
m
出力
G (s )
D
M
( Ms 2 + Ds + K ) X ( s ) = F ( s )
図 2.3 質量ーばねーダンパ系
伝達関数 G (s)
G(s) =
1
X ( s)
=
Ms 2 + Ds + K
F ( s)
3
フィードバック制御入門 第2章
[ 例 2.11 ]
RLC 回路
ei (t ) :入力
d eo (t )
de (t )
LC
+ RC o + eo (t ) = ei (t )
dt 2
dt
eo (t ) :出力
2
Ei ( s) = L[ei (t )]
ラプラス変換
L
R
1’
[ 例 2.9 ]
2’
E0 ( s ) = L[e0 (t )]
RC
(すべての初期値 = 0)
i (t )
ei (t )
eo (t )
C
LCs 2 Eo ( s ) + RCsEo ( s ) + Eo ( s ) = Ei ( s )
deo (t )
+ eo (t ) = ei (t )
dt
Ei ( s ) = L[ei (t )]
[ 例 2.11 ]
質量ーばねーダンパ系
f (t ) :入力
2
d x(t )
dx (t )
+D
+ Kx (t ) = f (t )
M
dt
dt 2
x(t ) :出力
x(t )
K
F ( s) = L[ f (t )]
Ms X ( s ) + DsX ( s ) + KX ( s ) = F ( s )
M
D
ei (t ) :入力
eo (t ) :出力
ラプラス変換
伝達関数 G (s )
システム的アプローチ
物知的実体の違いを越えてこれらを数理的に記述されるダ
イナミカルシステムとして普遍的に捉えその中に共通する
概念や方法論を構築していく
(すべての初期値 = 0)
v
x
τ
速度
角速度
ω
[ m/s ]
変位
M
[ rad/s]
角変位
θ
[m ]
質量
[N ⋅ m ]
[ rad]
J
[ kg ]
[ N ⋅ s/m ]
ばね定数
K
[ N/m ]
e
i
q
水位系
電圧
[V ]
電流
[A ]
電荷
[C ]
熱系
水位
h
[m ]
流量
q
[m 3 / s]
温度
θ
[K ]
熱流量
q
流体量
V
[ kg ⋅ m 2 ]
B
[ N ⋅ m ⋅ s/rad ]
ばね定数
K
[ N ⋅ m/rad ]
L
[ J/s ]
熱量
Q
[m 3 ]
[J]
[Ω ]
容量
C
[F]
出口抵抗
[s / m 2 ]
液面面積
A
[m 2 ]
熱抵抗
R
[ K ⋅ s/J ]
熱容量
C
[ J/K ]
2
1
Eo (s)
1
=
Ei ( s) LCs2 + RCs + 1
むだ時間要素
y (t ) = u (t − L)
u (t )
[m 3 / s ]
L =l /v
− as
ラプラス変換 L[ f (t − a)] = e F ( s )
v [m / s ]
(ラプラス変換の【性質5】)
A
伝達関数 G (s )
Y (s)
= e − sL
G( s) =
U ( s)
パデー近似
l [m]
y (t )
0
u (t )
出力
むだ時間
t
U ( s)
e − sL
B
y (t )
[m 3 / s ]
図 2.10 むだ時間要素の例
u (t )
入力
R
eo (t )
C
図 2.4 RLC回路
[H ]
抵抗
R
i (t )
ei (t )
伝達関数 G(s)
慣性モーメント インダクタンス
粘性摩擦係数 粘性摩擦係数
D
電気系
2’
LCs Eo ( s ) + RCsEo ( s ) + Eo ( s ) = Ei ( s )
Y ( s ) = e − sLU ( s )
表 2.4 物理システムのアナロジー
L
R
2
[ 例 2.13 ]
[N]
1’
E0 ( s ) = L[e0 (t )]
G( s ) =
1
X ( s)
=
Ms 2 + Ds + K
F ( s)
f
Ei ( s) = L[ei (t )]
( LCs 2 + RCs + 1) Eo ( s ) = Ei ( s )
図 2.3 質量ーばねーダンパ系
機械系
(回転運動)
トルク
Eo ( s )
1
=
Ei ( s ) RCs + 1
d eo (t )
de (t )
LC
+ RC o + eo (t ) = ei (t )
dt 2
dt
( Ms 2 + Ds + K ) X ( s ) = F ( s )
機械系
(直線運動)
力
2
図 2.8 RC回路
RLC 回路
f (t )
(すべての初期値 = 0)
2
G(s) =
eo (t )
C
1
2
X ( s) = L[ x(t )]
ラプラス変換
i (t )
ei (t )
Eo ( s ) = L[eo (t )]
2’
伝達関数 G (s )
G(s) =
[ 例 2.10 ]
R
1’
( RCs + 1) Eo ( s) = Ei ( s)
Eo (s)
1
=
Ei ( s) LCs2 + RCs + 1
G( s ) =
ei (t ) :入力
eo (t ) :出力
RCsEo ( s) + Eo ( s) = Ei ( s )
図 2.4 RLC回路
伝達関数 G(s)
入力のラプラス変換
(すべての初期値 = 0)
2
1
出力のラプラス変換
RC 回路
ラプラス変換
( LCs 2 + RCs + 1) Eo ( s ) = Ei ( s )
=
伝達関数
y (t ) = u (t − L)
0
Y (s)
L
t
図 2.11 むだ時間要素
4
フィードバック制御入門 第2章
[ 例 2.14 ]
2.3 ブロック線図
DC サーボモータ
電機子回路
ブロック線図
ea (t ) = La
システムの結合 / 信号の流れの様子を表現
逆起電力
ブロック線図の基本単位
加え合せ点
基本単位
引き出し点
ブロック
加え合せ点
引き出し点
記号
u
y
G
+
u
y = Gu
y
±
ω (t ) =
式
w
y
u
z
y =u±w
τ (t ) = Kτ ia (t )
回転運動
1
(ea ( s) − eb (s) )
La s + Ra
eb ( s ) = K bω ( s )
dθ (t )
ω (t ) =
dt
1
θ ( s) = ω ( s)
s
発生トルク
回転運動
τ (t ) = J
dω (t )
+ Bω (t )
dt
ω ( s) =
1
τ ( s)
Js + B
τ (s )
Kτ
(d) ω ( s ) =
ω (s)
ω (s )
θ (s )
1
s
1
(e) θ ( s ) = ω ( s )
s
1
τ (s)
Js + B
図 2.13 DC サーボモータの各部のブロック線図
+
1
La s + Ra
−
ia (s )
(a)
τ (s )
Kτ
1
Js + B
(c)
eb (s )
ω (s )
(d)
Kb
1
s
θ (s )
(e)
(b)
図 2.14 DC サーボモータの全体のブロック線図
アナロジー
直列結合,並列結合,フィードバック結合
システム的アプローチ
表 2.2 ブロック線図の結合方式
結合方式
Network
TCP Network
1
Js + B
ブロック線図の結合方式
むだ時間要素
TCP
τ (s )
(c) τ (t ) = Kτ ia ( s )
eb (s )
Kb
(b) eb ( s ) = K bω ( s )
1
(ea (s) − eb ( s) )
La s + Ra
ea (s )
τ ( s ) = Kτ ia ( s)
ω ( s)
ia ( s )
1
La s + Ra
−
eb (s)
(a) ia ( s ) =
ia ( s )
逆起電力
τ (t ) = Kτ ia (t )
dω (t )
+ Bω (t )
dt
τ (t ) = J
+
eb (t ) = K bω (t )
J, B
図 2.12 DCサーボモータ
ea ( s )
ia ( s ) =
θ (t )
dθ (t )
dt
発生トルク
電機子回路
dia (t )
+ Ra ia (t ) + eb (t )
dt
I f (一定)
y = u, z = u
ラプラス変換
ea (t ) = La
ia (t )
ea (t )
eb (t ) = K bω (t )
表 2.1 ブロック線図の基本単位
ブロック
La
Ra
dia (t )
+ Ra ia (t ) + eb (t )
dt
TCP
直列結合
並列結合
結合前
u
G1
z
G1
u
G2
オーバーフロー
u +
フィードバック
結合
G1
m
G2
結合後
u
G2G1
u
G1 ± G2
y
G2
y
y1
+
±
y
y
y2
y
u
G1
1 ± G1G2
y
5
フィードバック制御入門 第2章
フィードバック結合
直列結合
u
y
z
G1
u
y
G2G1
G2
y = G2 z
z = G2 y
y1
G1
u
+
±
G2
y
y = G1 (u − z )
y
u
G1 ± G2
y2
y = G1 (u − G2 y )
y = G1u ± G2u
y1 = G1u
= (G1 ± G2 )u
y2 = G2u
[ 例 2.15 ] DC サーボモータ
ia (s)
1
La s + Ra
Kτ
τ (s)
ea (s)
ω (s )
1
Js + B
+
−
θ (s )
1
s
直列結合
eb (s)
τ ( s)
1
Js + B
ω ( s)
θ (s)
1
s
ea (s )
Kb
フィードバック結合
ω (s )
Kτ
( La s + Ra )( Js + B) + K b Kτ
Kb
La
Ra
+
−
eb (s )
θ (s)
1
s
θ (s )
1
s
直列結合
eb ( s )
ea (s )
ω (s )
Kτ
( La s + Ra )( Js + B)
y
G1
1 ± G1G2
Kb
Kτ
La s + Ra
+
−
u
(1 + G1G2 ) y = G1u
G1
y=
u
1+ G1G 2
y = y1 ± y2
ea ( s )
G2
ネガティブ・フィードバック
並列結合
+
−
y
G1
− z
+
ポジティブ・フィードバック
y = G2G1u
z = G1u
ea (s)
u +
ネガティブ・フィードバック
ω (s)
Kτ
( La s + Ra )( Js + B)
eb (s)
1
s
θ (s )
θ (s ) I
f
直列結合
ia (t )
θ (t )
(一定)
ea (s )
J,B
Kb
フィードバック結合
図 2.13 DCサーボモータ
等価変換
ブロックの
入れ替え
変換前
u
z
G1
u
加え合せ点の
入れ替え
+
変換後
y
+
±
y
G2
u
±
v
+
w
y
G1
y
+
±
±
w
u
u
u
変換前
ブロックと
加え合せ点の
入れ替え(2)
v
u
v
u
ブロックと
引き出し点の
入れ替え(1)
ブロックと
引き出し点の
入れ替え(2)
u
u
u
y
u +
ブロックと
加え合せ点の
入れ替え(1)
変換後
G
±
y
+
G
±
v
G
y
+
G
u
y
+
±
v
±
G
1/ G
v
u
u
引き出し点の
入れ替え
z
G2
u
図 2.15 DC サーボモータのブロック線図の簡略化
等価変換
表 2.3 ブロック線図の等価変換
θ (s )
Kτ
s{( La s + Ra )( Js + B ) + K b Kτ }
ea (t )
y
G
u
y
G
y
u
y
G
y
G
u
y
G
y
1/ G
6
フィードバック制御入門 第2章
代表的な非線形要素
(a)飽和
(b)不感帯
(c)二位置リレー
(d)三位置リレー
(e)二位置リレー
(ヒステリシスあり)
(f)三位置リレー
(ヒステリシスあり)
(g)バックラッシュ
(h)わん曲
[ 例 2.4] 水位系
δqi (t ) :入力
dAh(t )
= qi (t ) − qo (t )
dt
A
δh(t ) :出力
qo (t ) = k h(t ) (ベルヌーイの定理)
qo 0 = qi 0 = k h0
(
h(t ) = h0 + δh(t )
A
M
δh(t ) :出力
Qi ( s ) = L[δqi (t )]
L
H ( s ) = L[δh(t )]
qi (t )
k
H ( s ) = Qi ( s )
2 h0
k
( As +
) H ( s) = Qi ( s )
2 h0
)
d
k
δh(t ) +
δh(t ) = δqi (t )
dt
2 h0
[ 例 2.12 ]
δqi (t ) :入力
(すべての初期値 = 0)
AsH ( s ) +
h
k
⎛ δh(t ) ⎞
δh(t )
⎟ = k h0 +
qo 0 + δqo (t ) ≈ k h0 ⎜⎜1 +
2 h0
2h0 ⎟⎠
⎝
k
δqo (t ) =
δh(t ) Q qo 0 = qi 0 = k h0
2 h0
qo (t ) = qo 0 + δqo (t )
ラプラス変換
h0
図 2.6 線形化
h0 の大きさに比べて δh が十分に小さいものとし, 2次以上の項を省略する
図 2.5 水位系
qi (t ) = qi 0 + δqi (t )
k
d
δh(t ) +
δh(t ) = δqi (t )
dt
2 h0
qo = k h
qo 0
⎛ δh(t )
⎞
= k h0 ⎜⎜1 +
+ L⎟⎟ テイラー展開
2h0
⎝
⎠
qo (t )
h(t )
動作点からの微小変化分に着目
A
k
h0
1
非線形項
[ 例 2.8] 水位系
傾き: 2
⎛ δh(t ) ⎞ 2
⎟
qo 0 + δqo (t ) = k h0 ⎜⎜1 +
h0 ⎟⎠
⎝
断面積 A
線形化
qo
d
(h0 + δh(t ) ) = (qo0 + δqo (t ) ) − (qi 0 + δqi (t ))
dt
qo 0 + δqo (t ) = k h0 + δh(t )
qi (t )
dh(t )
A
+ k h(t ) = qi (t )
dt
付録
線形の微分方程式
i0 + δi (t )
磁気浮上系
⎛ i (t ) ⎞
d 2 x (t )
= Mg − k ⎜⎜
⎟⎟
dt 2
⎝ x(t ) ⎠
2
非線形項
di(t )
+ Ri (t ) = e(t )
dt
電磁石
e0 + δe(t )
L, R
f m (t )
x0 + δx(t )
x(t ) = x0 + δx(t ), i (t ) = i0 + δi (t )
断面積 A
鉄球
e(t ) = e0 + δe(t )
Mg
qo (t )
h(t )
2
2
⎛ i(t ) ⎞ ⎛ i0 ⎞
⎜⎜
⎟⎟ = ⎜⎜ ⎟⎟ + L
⎝ x(t ) ⎠ ⎝ x0 ⎠
線形化
d δx (t )
= K xδx (t ) − K iδi (t )
dt 2
図 2.9 磁気浮上系
2
伝達関数 G (s )
G ( s) =
H ( s)
1
=
Qi ( s )
As + k / 2 h0
M
図 2.5 水位系
dδi (t )
+ Rδi (t ) = δe(t )
L
dt
Kx =
2ki
2ki02
, Ki = 20
x0
x03
7
フィードバック制御入門 第2章
ラプラス変換
I δ ( s) = L[δi (t )]
Eδ (s)
I δ (s )
1
Ls + R
I δ (s )
− Ki
Ms 2 − K x
d
( x (t ) + l sin θ (t )) = f (t )
dt 2
mlθ&&(t ) = mg sin θ (t ) − m&x&(t ) cosθ (t )
X δ (s )
mlθ&&(t ) + m&x&(t ) cos θ (t ) = mg sin θ (t )
cosθ (t ) = 1 −
f (s)
θ (t )
2!
3!
f (s)
+L
1
( M + m) s 2
x(s)
+
−
1
( M + m) s 2
+
x(s)
−
mls 2
( M + m) s 2
θ (s)
θ (s )
mls 2
( M + m) s 2
x( s) = L[ x(t )], θ ( s ) = L[θ (t )], f ( s) = L[ f (t )]
1
mls 2
f (s) −
θ (s)
( M + m) s 2
( M + m) s 2
+L
2
mlθ&&(t ) + m&x&(t ) = mgθ (t )
mlθ&&(t ) + m&x&(t ) = mgθ (t )
⇒ x( s ) =
θ (t ) 3
( M + m) &x&(t ) + mlθ&&(t ) = f (t )
− Ki
X δ (s)
=
Eδ ( s ) ( Ms 2 − K x )( Ls + R)
( M + m) s 2 x( s ) + mls 2θ ( s ) = f ( s )
非線形項
θ (t ) ≈ 0 であるとき,
sin θ (t ) ≈ θ (t ), cosθ (t ) ≈ 1, θ& 2 (t ) ≈ 0
sin θ (t ) = θ (t ) −
( M + m) &x&(t ) + mlθ&&(t ) = f (t )
ラプラス変換
f (t )
( M + m) &x&(t ) − mlθ& 2 (t ) sin θ (t ) + mlθ&&(t ) cos θ (t ) = f (t )
線形化
伝達関数 G (s )
m
l
式整理
− Ki
( Ms 2 − K x )( Ls + R )
G ( s) =
θ (t )
x(t )
M&x&(t ) + m
Ms 2 X δ ( s ) = K x X δ ( s ) − K i I δ ( s )
− Ki
⇒ X δ (s) =
Iδ (s)
Ms 2 − K x
1
Eδ ( s )
Ls + R
倒立振子
2
(すべての初期値 = 0)
LsI δ ( s ) + RI δ ( s) = Eδ ( s)
⇒ Iδ (s) =
[ 2章 演習問題【4】 ]
Eδ ( s) = L[δe(t )], X δ ( s) = L[δx(t )]
s2
g − ls 2
mls 2θ ( s ) + ms 2 x( s ) = mgθ ( s )
⇒ θ ( s) =
x(s )
f (s )
s2
x( s )
g − ls 2
s2
g − ls 2
θ (s )
( M + m)( g − ls 2 )
( M + m)( g − ls 2 ) + mls 2
1
( M + m) s 2
f (s)
ls 2 − g
s {Mls − ( M + m) g}
2
x(s )
x(s )
2
伝達関数 G ( s )
x( s)
ls 2 − g
= 2
G (s ) =
2
f ( s ) s {Mls − ( M + m) g}
8
© Copyright 2026