
PDF:2659KB
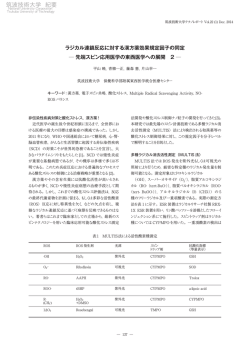
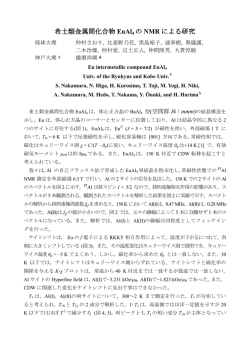
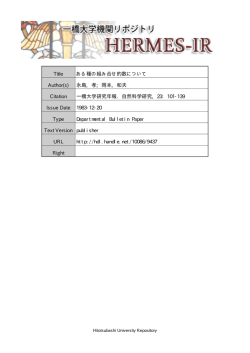
(別紙 1) ImPACT タフ・ロボティクス・チャレンジ(ImPACT-TRC) 5種類のプラットホームロボットの概要, 求められるタフ・ロボティクス技術の例, プラットホームロボットの提供形態 1.飛行ロボット(図1) (1)ロボットの概要 ・ミニサーベイヤ―, MS-06LA ・大きさ:直径 90 cm,高さ 50 cm,正味重量(バッテリ除く) :3 kg,ペイロード:6 kg,飛行時 間:約 20 分~30 分,最大飛行速度:10 m/s,耐風速:12 m/s ・自律航法:GPS/INS 航法,3D-SLAM 航法, TS 航法(トータルステーション) ・機能:自動離着陸, フェールセーフ, 自動帰還他 (2)解決が必要な課題,必要なタフロボティクス技術の例 ・3次元ビジュアル SLAM を用いた屋内外でのマッピングと自己位置推定・自律飛行制御 ・オプティカルフローを用いた速度制御と自己位置推定 ・動力系故障判断システムの確立と故障容認制御・フォルトトレランス制御 ・セルフチューニング制御による次世代オートパイロットの開発 ・実時間モデリングと制御切換および実時間軌道生成によるスーパーバイザリ制御 ・パラシュート搭載による安全性の向上と自動起動および張力制御による着陸地点制御 ・ロボットハンド搭載型飛行ロボットの研究開発 ・複数機の同時飛行によるスワーム飛行、編隊飛行、リーダー・フォロワー飛行 ・従来の飛行ロボットをはるかに凌ぐ、超ロバストなスパー飛行ロボットの研究開発 ・10 km 程度のデータリンクが可能な飛行ロボットを核とした強靭なネットワーク構築 ・構造物近くでの気流の変化,急激に変化する突風等の外乱に対するロバスト性 (3)プラットホームとしての提供形態 ・フィールドで取得したセンサ情報の提供(ベンチマークデータとして)<2015 年 4 月以降順次 > ・センサ情報処理ソフトの搭載,共同実験<2015 年 6 月以降順次,貸出機数台を用意,研究費で の購入も可> ・ロボット自体の提供,改造,共同実験<2015 年 6 月以降順次,貸出機数台を用意,研究費での 購入も可.千葉県内,または,東北大で実験可.> (4)参考文献 ・K. Nonami, K. Farid, S. Suzuki, W. Wang, Autonomous Flying Robots, Springer, 2010. ・K. Nonami. K. Muljowidodo, K. J. Yoon, Autonomous Control Systems and Vehicles, 2013. ・F. Kendoul, K. Nonami, I. Fantoni, R. Lozano, An adaptive vision-based autopilot for mini flying machines guidance, navigation and control, Autonomous Robots, Vol. 27, pp. 165-188, 2009. 2.複合ロボット(図2) (1)ロボットの概要 ・建設機械をベースとした災害対応多機能ロボット (第1ステップの油圧ショベルタイプロボット) ・ 車体重量 2〜3 [ton],全幅 1500 [mm] × 作業機リーチ 4000 [mm]程度,クローラ走行 ・ 新油圧制御システムによる従来の建設機械を大幅に超える位置・速度・力等の制御性を実現 ・ オープンミドルウェア(ROS)に対応したコントローラ ・ 遠隔操作 (第2ステップの災害対応ロボット) ・車体重量 2〜3 ton,全幅 1500 mm×全長 4000 mm 程度 ・二重旋回機構を適用により多様な機体形態を取ることが可能 ・双腕,クローラ走行 ・新油圧制御システムによる従来の建設機械を超える優れた位置・速度・力の制御性 ・オープンミドルウェア(ROS)に対応したコントローラ ・遠隔操作対応(通信方式未定.国内電波法の適用範囲内とする) (2)解決が必要な課題,必要なタフロボティクス技術の例 ・今回の公募は第1ステップの油圧ショベルタイプロボットについて行うが,第2ステップの災 害対応ロボットへの展開が可能な研究開発を求める ・ 自律作業(本ロボットを用いて実現したい作業内容についても提案ください) ・ クローラ・腕協調動作 ・ 自律走行(クローラ) ・ 災害対応のエンドエフェクタ ・ 地形認識,音声認識,周辺環境・情報取得・提示 ・ 遠隔操作システム,操作インターフェース ・ 通信システム(国内電波法の適用範囲内とする) (3)プラットホームとしての提供形態 ・単腕ロボットのシミュレーションモデル(ROS/Gazebo)の提供<2015 年 9 月以降順次> ・ロボット自体の提供,改造,共同実験<2016 年 6 月以降順次,コマツ試験フィールド,または, 東北大フィールドで共同実験> (4)参考文献 ・ Hiroshi Yoshinada, Shu Takeda, Shinich Yokota, Development of large scale bi-lateral manipulator for heavy industries, Proc. 8th JFPS International Symposium on Fluid Power, pp. 324-329, 2011. ・Hiroshi Yoshinada, Kenji Okamura, Shinich Yokota, Master-slave control method for hydraulic excavator, J. Robotics and Mechatronics, Vol. 24, No. 6, pp. 977-984, 2012. 3.脚ロボット(図3) (1)ロボットの概要 ・身長 1300 mm(2肢立脚時) ,体重 100 kg,1 肢 7 自由度を含む全 30 自由度の構成 ・2足歩行や4足歩行など様々な移動様式で移動可能 ・極限環境下での高いアクセシビリティ ・力強いマニピュレーション ・各肢エンドエフェクタは,取替え可能/マルチ機能化することで,多様なタスクに対応可能 (2)解決が必要な課題,必要なタフロボティクス技術の例 ・小型化:アクチュエータ・減速機一体型小型軽量回転関節機構 ・小型化:ロック・フリーの切り替えが可能なアクチュエーション機構 ・移動安定化:安定した足場(大きな支持多角形)を確保可能な脚ロボット用フット マニピュレーション:様々な形状の物体を把持可能なハンド ・マニピュレーション:人間用工具をそのまま使用可能なハンド ・高精度な3次元環境センシング(1000 mm 先の対象物で±10 mm 程度の精度) ・遠隔操操縦システム ・脚ロボット用の動作生成用インタフェース (3)プラットホームとしての提供形態 ・シミュレーションモデル(ROS/Gazebo)の提供<2015 年 4 月以降順次> ・ロボット自体の提供,改造,共同実験<2016 年 9 月以降順次,早稲田大学にて共同実験> (4)参考文献 ・橋本健二,菅原雄介,川瀬正幹,林昭宏,田中智明,太田章博,沢戸瑛昌,遠藤信綱,林憲玉, 高西淳夫,着地軌道修正制御と推定姿勢補償制御による人間搭乗型2足歩行ロボットの屋外歩行 の実現,日本ロボット学会誌,Vol. 25,No. 6,pp. 851-859,2007. ・Y. Ogura, H. Aikawa, K. Shimomura, H. Kondo, A. Morishima, H. O. Lim, A. Takanishi, Development of a humanoid robot WABIAN-2, Proc. ICRA2006, pp. 76-81, 2006. 4.索状ロボット 4.1 細径索状ロボット(図4.1) (1)ロボットの概要 ・ (ロボットの構造)長さ 10 m,直径 50 mm のヘビ型ロボット.先端にカメラと照明を有し,IMU, マイクロフォン,スピーカー,ガスセンサなどを内蔵できる.オペレータが遠隔操作する. ・瓦礫内の奥深く,細径配管の内部,入り組んだ構造物の内部,など狭く暗い場所に進入し,内 部を調査する. ・細径のため搭載できるデバイスの大きさや重量はかなり限定される (2)解決が必要な課題,必要なタフロボティクス技術の例 ・瓦礫内・配管内での位置推定,3D形状測定,3Dマッピング オドメトリが取れないので外界センサで位置推定が必要. 瓦礫や配管には画像特徴が少なく,照明がカメラと共に移動するため,Structure from Motion が困難 ・瓦礫内・配管内での情報収集 騒音環境下で,瓦礫の中から救助を求める人の音声の認識,聞き分け,位置推定 配管の減肉,漏洩などの計測 ・使いやすい遠隔操作制御装置 分布振動駆動などの特殊な駆動原理で,索状体が柔軟であるため,移動方向が定まらず, 操作が困難 指定した方向に移動させる制御技術 3Dマップ内での遠隔操作指令 ・どこでも動ける運動性能 (3)プラットホームとしての提供形態 ・フィールドで取得したセンサ情報の提供(ベンチマークデータとして)<2015 年 4 月以降順次 > ・センサ情報処理ソフトの搭載,共同実験<2015 年 6 月以降順次,貸出機数台を用意,研究費で の購入も可> ・ロボット自体の提供,改造,共同実験<2015 年 6 月以降順次,貸出機数台を用意,研究費での 購入も可> (4)参考文献 ・Fukuda Junichi, Masashi Konyo, Eijiro Takeuchi, Satoshi Tadokoro, Remote vertical exploration by active scope camera into collapsed buildings, Proc. IROS2014, pp. 1882-1888, 2014. ・Kazunari Hatazaki, Masashi Konyo, Kazuya Isaki, Satoshi Tadokoro, Fumiaki Takemura, Active scope camera for urban search and rescue, Proc. IROS 2007 , pp. 2596-2602, 2007. 4.2 太径索状ロボット(図4.2) (1)ロボットの概要 ・ヘビ型ロボット:長さ 1.5 m,縦 0.1 m, 横 0.1 m,関節数 20 程度.必要によって受動車輪を装 着する. ・侵入可能な空間:25 cm×25 cm 程度. (2)解決が必要な課題,必要なタフロボティクス技術の例 ・環境と接触を計測し防塵防水を実現する外皮 タフな屋外環境で適応的な推進を実現するために必要 ・コンプライアンスを持つ関節 環境適応性とハードウェアの頑健性を向上させるため ・瓦礫内・配管内での位置推定,3D形状測定,3Dマッピング オドメトリが取れないので外界センサで位置推定が必要. 瓦礫や配管には画像特徴が少なく, 照明がカメラと共に移動するため Structure from Motion が困難 ・配管内側・外側での滑落回避 径が一様でなく,錆やぬめりがある配管の内側および外側を移動する際の滑落・スタックの 予兆検知・予防と復旧 ・冗長性を活かした耐故障性能向上 故障個所の補償動作や,故障予防(壊れにくくする動作,衝撃低減動作)が必要 ・スタックの予防と復旧 スタック問題の解決のため,スタックを予防する動作方法,スタック検出,復旧動作の確立 ・狭所適応制御 狭所環境では,障害物に体を押し付けるような障害物利用動作と障害物を避ける障害物回避 動作の使い分けが必要 (3)プラットホームとしての提供形態 ・シミュレータの提供(ODE)<2015 年 4 月以降順次> ・取得したセンサ情報の提供<2015 年 4 月以降順次,貸出機数台を用意,研究費での購入も可> ・ロボット自体の提供,改造,共同実験<2015 年 6 月以降順次,貸出機数台を用意,研究費での 購入も可> (4)参考文献 ・田中,塚野,松野,円柱曲面上におけるヘビ型ロボットの滑落回避を考慮した軌道追従制御, 計測自動制御学会論文集, Vol.48, No.10, pp.664-673, 2012. ・Tetsushi Kamegawa, Ryoma Kuroki, Akio Gofuku, Evaluation of snake robot's behavior using randomized EARLI in crowded obstacles, Proc. SSRR2014, 2014 5.動物サイボーグ(図5) (1)ロボットの概要 ・コンクリート瓦礫、森林、建物の中を探査する際の犬(特に、災害救助犬)の見ている映像、 犬の位置、犬の状態、犬の周囲の状況(ガス、温度、空気のきれいさ)を記録。収集した情報を 統合し、探査結果を可視化。ハンドラーから見えない場所を探査する犬のデータを数十m離れた 場所から確認。 ・3000 m2 以上の範囲を動き回っても疲れない装置(大きさ、重さ) 。1カ所は 10 分程度、0.5〜 1 時間程度の間に数カ所行う探査。 ・搭載する装置は小型で軽量なものが必要(体重の10%未満の重さ、重量バランス) 。 (2)解決が必要な課題,必要なタフロボティクス技術の例 ・建物内での位置推定,3D形状測定,3Dマッピング 犬はオドメトリが取れないので外界センサで移動量(速度)や位置推定が必要. 犬の歩容の特徴を利用した移動量や位置の推定 犬の位置推定と形状を合わせた周囲の3次元計測 ・犬の状態の推定 モーションセンサや生体センサにより、感情(喜、恐怖)や、犬の疲れの度合いの見える化 犬が見ている映像と、犬の状態との関連づけの推定 ・臭いの可視化 犬とおなじ高感度な臭いセンサを搭載し、臭いの計測・可視化 建物内部の臭いの可視化(強さ、臭いの流れ) ・計測装置の改善 小型犬にも搭載できるように、計測装置の小型化・軽量化 映像やデータを伝送する無線通信の長距離化 センサデバイスのワイアレス化 ・犬の行動の制御 (3)プラットホームとしての提供形態 ・フィールドで取得したセンサ情報の提供(ベンチマークデータとして)<2015 年 4 月以降順次 > ・画像処理、音声認識、センサ情報処理ソフトの搭載,共同実験<2015 年 6 月以降順次,貸出機 数台を用意,研究費での購入も可.救助犬訓練所,または,野原で共同実験可.> ・計測装置の提供,改造,共同実験<2015 年 6 月以降順次,貸出機数台を用意,研究費での購入 も可救助犬訓練所,または,野原で共同実験可.> (4)参考文献 ・坂口尚己,大野和則,永谷直久,竹内栄二朗,田所諭,災害救助犬が長時間装着可能な探査記 録装置の開発,ロボティクス・メカトロニクス講演会,1P1-P11, 2013. ・Naoki Sakaguchi, Kazunori Ohno, Eijiro Takeuchi, Satoshi Tadokoro, Precise velocity estimation for dog using its gait, Proc. 9th Conference on Field and Service Robotics, 2013. 図1 飛行ロボット 図2 複合ロボット 図3 脚ロボット 図4.1 細径策状ロボット 図4.2 太径索状ロボット 図5 動物サイボーグ

© Copyright 2026