
Simulink Control Design
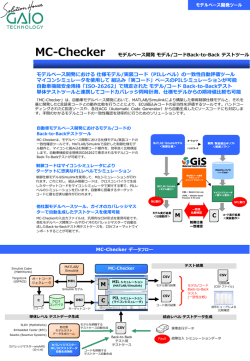
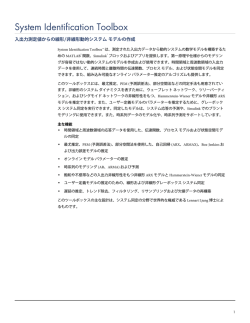
Simulink Control Design モデルの線形化と制御システムの設計 Simulink Control Design™ では、Simulink® でモデル化されたプラントおよび制御システムの設計と解析 ができ、パフォーマンス要件に合わせて PID コントローラーのゲインを自動的にチューニングできま す。また、操作点を探索し、さまざまな動作条件で Simulink モデルの線形化を厳密に計算できます。 また、Simulink Control Design は、モデルを変更することなく、シミュレーションに基づいて周波数応 答を計算するツールを提供します。グラフィカル インターフェイスにより、カスケード、プレフィル ター、レギュレーション、マルチループ アーキテクチャなど、Simulink でモデル化された任意の制御 構造の設計および解析を行うことができます。 制御システムの詳細をご覧ください。 主な機能 ▪ Simulink ライブラリからの PID コントローラー ブロックの自動チューニング ▪ Simulinkモデルの操作点計算 (平衡化) と線形化 ▪ Simulink モデルシミュレーションに基づいた周波数応答の計算 ▪ Simulink 内で任意の制御システムをグラフィカルに自動チューニング ▪ 時間領域および周波数領域の要求仕様を満たすように補償器を数値的に最適化 (Simulink Design Optimization™ を使用) ▪ 自動化された線形化スクリプトの開発や線形化のバッチ実行のための MATLAB® 関数 1 Simulink Control Design による制御システムの設計および解析。Simulink でモデル化された制御システム (上)、PID 調整器 インターフェイス (左)、開ループ伝達関数のボード線図 (右)。 PID コントローラーのチューニング Simulink Control Design は、Simulink PID Controller ブロックのゲインの自動チューニング機能を提供し ます。PID コントローラーの最初のチューニングは、1 回のクリックで完了します。この製品は線形プ ラント モデルを得るために、Simulink モデルを線形化します。PWM (パルス幅変調) のように不連続性 が原因でモデルがゼロに線形化される場合は、システム同定を使用してシミュレーションの入出力デ ータから線形プラント モデルを作成できます (System Identification Toolbox™ が必要)。 そしてこの線形プラント モデルと独自のチューニング方法を使用し、要求される閉ループのパフォー マンスに基づいて PID ゲインを計算します。最初のコントローラーは、システム ダイナミクスの解析 に基づいて提案されます。その後 PID 調整器 で応答時間および過渡的振る舞いを対話的に調整するこ とができます。また、PID 調整器 には、コントローラーの挙動の解析に使用できる複数のプロット機 能が用意されています。たとえば、ステップ設定値追従プロットや開ループのボード線図を使用し て、現在の設計と初期のゲイン値に対応した設計のパフォーマンスを比較できます。 DC モーター向けの PID コントローラーの設計 3:53 PID Controller ブロックのゲインは自動的に調整されます。 2 不連続性をもつモデルの PID コントローラーのチューニング 5:40 線形化できないモデルに対して PID コントローラーを設計します。システム同定を 使用してシミュレーションの入出力データからプラント モデルを同定します。 Simulink モデルの平衡化と線形化 モデルの平衡化 一般的に線形制御の設計では、非線形モデルのさまざまな設定点を考慮するために複数の操作点につ いて検討する必要があります。Simulink Control Design では、モデルの操作点を決定するためのグラフ ィカル インターフェイスが用意されています。以下を行うことができます。 ▪ 数値最適化を使用してユーザー定義の設定点から操作点を計算 ▪ シミュレーション中の指定の時間またはイベントにおいて操作点のスナップショットを取得 これらの操作点は、定常状態でのシミュレーションの初期化や、線形化および制御系設計のベースと して使用できます。 航空機モデルの平衡化、線形化および制御設計 7:17 非線形の航空機モデルを平衡化および線形化し、その結果作成された線形モデルを 使ってピッチ速度用のダンパー制御器を設計します。 モデルの線形化 Simulink Control Design を用いて、連続、離散およびマルチレートの Simulink モデルを線形化できま す。グラフィカルな信号注釈マークを使用してループ開始位置や線形化の入出力点を指定でき、モデ ル全体、モデルの一部分または 1 つのブロックやサブシステムを線形化できます。信号注釈マーク は、開ループ解析および閉ループ解析で使用できます。この注釈や解析は、モデルのシミュレーショ ンの挙動には影響を与えません。 Simulink Control Design は、線形化されたモデルを自動的に計算して、ステップ応答プロットやボード 線図に結果を表示します。また、線形化インスペクター が提供されており、線形化の対象となる Simulink モデル内の各ブロックの影響を表示できます。モデル内の任意の数のブロックに線形動作を 指定することにより、結果を微調整できます。線形動作はゲイン行列または LTI モデルとして指定で きるため、Stateflow® チャートやパルス幅変調信号ベースのシステムのように不連続またはイベントベ ースのコンポーネントを含む Simulink モデルの線形化を行う際に、柔軟性が得られます。 Robust Control Toolbox™ を使用すれば、モデル内で伝達関数およびゲインに不確かな値を直接指定する ことにより、不確かさを含む線形モデルを計算できます。この不確かさを含む線形モデルを使用し て、制御システムの安定性およびパフォーマンスに対して、不確かさが与える影響を検討できます。 これらツールにはすべて、平衡化および線形化のバッチ処理を行うスクリプトを記述するためのコマ ンド ライン API が含まれています。スクリプトは自分で記述することも、グラフィカル インターフェ イスから MATLAB コードを自動生成することもできます。 3 バッチ モードでの平衡化と線形化 5:20 Simulink モデルの平衡化と線形化をバッチ モードで実行するスクリプトを作成しま す。 モデルの周波数応答の計算 Simulink Control Design は、シミュレーションに基づいたモデルの周波数応答の計算のためのツールを 提供します。これらのツールは次の用途に使用できます。 ▪ 線形化の結果の検証 ▪ 強い不連続性やイベントベースのダイナミクスによって記述されたモデルのように、線形化手法が 適切でないモデルの周波数応答の計算 ▪ 励起信号の振幅が非線形システムのゲインおよび位相特性に与える影響の検討 Simulink Control Design により、サイン スイープやチャープ信号などの励起信号の生成、シミュレーシ ョンの実行、データの収集、モデルの周波数応答の計算およびプロットを行うことができます。周波 数応答の計算に使用されるアルゴリズムは、シミュレーション時間を最小限に抑え、Simulink のアク セラレータ モードとラピッド アクセラレータ モードを使用して全体の計算速度を高めるように設計さ れています。 周波数応答の推定 6:15 シミュレーションを使用して Simulink モデルの周波数応答を推定します。 Simulink での制御システムの設計と解析 Simulink Control Design は、Control System Toolbox™ のグラフィカルで自動化されたチューニング機能 を使用して、Simulink 上で直接制御ループをチューニングするためのグラフィカル インターフェイス を提供します。Simulink で作成した線形化可能な任意の制御アーキテクチャが使用できます。チュー ニング可能な Simulink ブロックには、ゲイン、伝達関数、零点 - 極、状態空間、PID Controller などが あります。Simulink Control Design は、チューニングされるブロックに対して自動的に関連する制御ル ープを識別し、制御システム デザイナー アプリの事前構成されたセッションを起動します。 非線形システム向けのコントローラー設計 9:09 根軌跡とボード線図を使用して、ホイール ローダーの非線形モデルにコントローラ ーを設計します。 制御システム デザイナー アプリは以下の用途に使用できます。 ▪ 連続・離散混在または連続、離散の SISO ループをグラフィカルにチューニング ▪ パラメーターのチューニング中に、ループの相互作用やループ結合の効果を観察 4 ▪ 独自の Robust Response Time の PID チューニング、Ziegler-Nichols の PID チューニング、IMC 設 計、LQG 設計など、システマティックな設計アルゴリズムを使用することで、補償器の設計値を 計算 ▪ 時間領域および周波数領域の設計要件を満たすように制御ループを最適化 (Simulink Design Optimization が必要) ▪ PID ゲイン、零点 - 極 - ゲイン表現、マスクされたブロックなどの Simulink ブロックのパラメータ ーを直接チューニング ▪ 目標値追従性や外乱抑制などの制御システムの性能を評価するため、モデルの任意の部分の閉ルー プ応答の確認 ▪ 非線形システム全体検証のために、チューニングされたパラメーター値の Simulink モデルへの書 き戻し マルチループ制御システムを最適化することで、周波数領域の要求仕様 (左) と時間領域の要求仕様 (右) を同時に達 成。グラフィカル インターフェイス (上) から最適化するコントローラーのパラメーターを指定。 リソース 製品詳細、例、および動作環境 www.mathworks.com/products/simcontrol オンライン ユーザー コミュニティ www.mathworks.com/matlabcentral 評価版ソフトウェア www.mathworks.com/trialrequest 技術トレーニング サービス www.mathworks.com/training 営業窓口 www.mathworks.com/contactsales サードパーティ製品とサービス www.mathworks.com/connections テクニカル サポート www.mathworks.com/support 世界各地のお問い合わせ先 www.mathworks.com/contact © 2014 The MathWorks, Inc. MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand names may be trademarks or registered trademarks of their respective holders. 5

© Copyright 2026