
ダウンロードはこちら
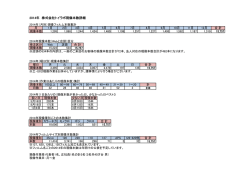
ETロボコン2015全体内容 ETロボコン2015実施説明会資料/ETロボコン実行委員会 1 ETロボコンとは? 組込みシステム開発分野における、 分析・設計モデリングと、若手および 初級エンジニア向けにモノ作りの楽しさ を経験する教育機会を提供する。 モデリングを 競う ロボット制御・ 性能を競う 世界的にもユニークな ソフトウェア重視の教育ロボコン ETロボコン2015実施説明会資料/ETロボコン実行委員会 2 全国共通展開 と 地域人材育成 ETロボコン2015実施説明会資料/ETロボコン実行委員会 3 ETロボコン2015実施説明会資料/ETロボコン実行委員会 4 Video ETロボコン2015実施説明会資料/ETロボコン実行委員会 5 企画・モデル審査 ワークショップ ETロボコン2015実施説明会資料/ETロボコン実行委員会 6 2014年 参加チーム 全国 北海道 東北 北関東 企業 154 4 4 8 大学 73 7 8 5 短大 12 0 4 0 専門学校 32 1 4 2 高専 25 1 3 3 高校 15 0 3 3 個人 22 1 1 1 特別 3 0 1 0 合計 336 14 28 22 東京 南関東 東海 61 22 26 11 5 4 4 0 1 2 3 5 0 0 4 0 2 2 4 1 4 0 0 0 82 33 46 北陸 2 6 0 0 0 0 0 0 8 関西 中四国 17 3 0 5 0 0 4 2 0 10 1 1[ 1 6 3 0 0 28 24 九州 7 14 0 7 2 0 1 0 31 沖縄 0 8 3 2 2 3 0 2 20 【デベロッパー部門】 302チーム (プライマリ 190) (アドバンスト112) 【アーキテクト部門】 34チーム ETロボコン2015実施説明会資料/ETロボコン実行委員会 7 2014年:2部門3クラス制 ~2012 2013 2014 プライマリー デベロッパー アドバンスト ETロボコン アーキテクト NEW アーキテクト 学ぶステップを明確にし より教育効果を高めた ETロボコン2015実施説明会資料/ETロボコン実行委員会 8 2014年:2部門3クラス制の導入 CCSF: レベル1,2 プライマリー クラス 技術の基礎を学びチャレンジする機会を提供 良いコード 良いモデル クラス 技術を応用できるスキルを磨く機会を提供 仕様変更 基礎 難所:(難易度:低) 過去を踏襲 アドバンスト 見て、真似て、考える 保守運用 設計の善し悪しで評価 応用 CCSF: レベル3,4 新技術要素 仕様変更 アーキテクト 部門 デ ベ ロ ッ パ | 部 門 難所:(難易度:高) 製品・サービスを企画・開発するスキルを磨く機会を提供 技術 魅せる 自ら評価基準を設定 企画 CCSF: レベル3,4 ETロボコン2015実施説明会資料/ETロボコン実行委員会 CCSF:IPA 共通キャリア・スキルフレームワーク 9 2015年 変化に対応する ETロボコン2015実施説明会資料/ETロボコン実行委員会 10 ETロボコンとは? 5年後、15年後に活躍する エンジニアを育てよう! ■5年後に活躍し始めるエンジニア アーキテクチャ、製品、サービスを企画、 つくりだすエンジニア ■15年後に活躍するエンジニア ビジネスをつくりだせるエンジニア ETロボコン2015実施説明会資料/ETロボコン実行委員会 11 変化① 2015年:2部門3クラス 名称変更 デ ベ ロ ッ パ | 部 門 プライマリー クラス アドバンスト クラス イノベーター部門 基礎 1.対象となる エンジニア明確に 応用 2.学ぶステップを 明確に、 より教育効果を 高める 生み出す 部門名称変更 ETロボコン2015実施説明会資料/ETロボコン実行委員会 12 変化② 新走行体 EV3と開発環境 ETロボコン2015実施説明会資料/ETロボコン実行委員会 13 変化③ 変化するコース難所 デ ベ ロ ッ パ | 部 門 ダイナミックに変化 動く難所の登場。 設計課題として モデリングでの対応へ。 ETロボコン2015実施説明会資料/ETロボコン実行委員会 14 変化④ 提案審査 イ ノ ベ | タ | 部 門 プレゼン力審査強化 ETロボコン2015実施説明会資料/ETロボコン実行委員会 15 ETロボコン2015 全体内容 ETロボコン2015実施説明会資料/ETロボコン実行委員会 16 ETロボコン2015 競技内容 ETロボコン2015実施説明会資料/ETロボコン実行委員会 17 NXTからEV3へ • 2015年からEV3を投入します • NXTは2015年まで利用可能の予定です 2014 2015 NXT 2016 2017 NXTは販売終了のため 今年が最後となります EV3 ETロボコン2015実施説明会資料/ETロボコン実行委員会 18 公式サポートする開発環境 項目 名称 OS種別 言語 統合 開発環境 デバッガ プログラム 転送 NXT EV3 nxtOSEK EV3RT MonoBrick leJOS Linux TOPPERSリアルタイム C# Java C、C++ C、C++ - - - - USB cable SDカード Bluetooth MonoDevelop Eclipse ◯ USB cable Bluetooth WiFi ◯ USB cable Bluetooth WiFi ※実行委員会によるサポートは行われないが、上記以外の環境でも参加は可能(Ruby、Python等) EV3開発環境構築ガイド https://sourceforge.net/p/etroboev3/wiki/ ETロボコン2015実施説明会資料/ETロボコン実行委員会 19 競技内容 走行体 コース ベーシック 難所 少 デ ベ ロ ッ パ ー 部 門 プライマリー 難易度は2014年同様 アドバンスト ベーシック 難所 多 ショートカット ダイナミック ハイレベルな課題 イノベーター部門 指定なし パフォーマ ンス エリア 助走なし プレゼン重視 自由度向上 ETロボコン2015実施説明会資料/ETロボコン実行委員会 20 EV3走行体 NXT走行体と形・動力性能が同等でNXT・EV3を混ぜて競技 ETrikeV EV3Way NXTway ETロボコン2015実施説明会資料/ETロボコン実行委員会 NXTrike 21 EV3走行体 デモンストレーション ETロボコン2015実施説明会資料/ETロボコン実行委員会 22 ETロボコン2015 競技内容 ETロボコン2015実施説明会資料/ETロボコン実行委員会 23 モデル審査について ETロボコン2015実施説明会資料/ETロボコン実行委員会 24 審査項目 • 各部門・カテゴリの特性に合わせ、以下の項 目を中心に審査を行います イノベーター Developer アドバンスト Developer 企画 開発力 設計技術 制御技術 プライマリー モデリング能力 部門・カテゴリ 審査項目 ETロボコン2015実施説明会資料/ETロボコン実行委員会 25 デベロッパー部門プライマリークラス • 「ソフトウェアの内容をモデルで正しく表現」する ことを重視した審査を行います – 選択した機能を実現するための方法が、モデルで正しく 分かり易く提示できていることを審査します • シナリオ:『どのようにすれば、機能を実現できるのか?』 • キャスト:『そのためには、どんな部品が必要か?』 • 脚本:『各部品を、どのように動かせばよいか?』 機能実現 モデルの内容が、正しく・ 分かりやすく記載されてい るか? ETロボコン2015実施説明会資料/ETロボコン実行委員会 指定された機能を実現する ための構成・方法が 正しく記載されているか? 表現 26 『機能実現』(1/2) 『FUNrobo2』(2014年) 審査コメント 『一枚目にある、課題達成 手順を記述したアクティビ ティ図の内容を起点として、 その動作を実現する構造と 振る舞いを記述しているの が、分かりやすい。』 ②キャスト ETロボコン2015実施説明会資料/ETロボコン実行委員会 ①シナリオ ③脚本 27 『機能実現』(2/2) 『EG-PG.Racing』(2014年) ①シナリオ 審査コメント 『フィギュアLを攻略するた めに必要な構造、振る舞いが 抽出されており、攻略の可能 性を十分に感じさせる。』 ②キャスト ETロボコン2015実施説明会資料/ETロボコン実行委員会 ③脚本 28 デベロッパー部門アドバンストクラス • 高性能を実現する制御技術と、それをソフトウェアとして実 現するための設計技術を評価します • 上記に加え、2015年の設計課題への対応を評価します – 内容は現在未定 ※2014年の課題は「未確定仕様への対応」 NEW 鋭意検討中! 機能を実現するために必要な 要素技術と、それらを使って コースをどのように走行する かの手順・方法が十分に検討 されているか? ETロボコン2015実施説明会資料/ETロボコン実行委員会 設計課題 への対応 設計技術 制御技術で記載された内容をソ フトウェアとして実現するため のアーキテクチャが十分に検討 されているか? 制御技術 29 『設計技術』 『ぶっこみライダーズ』(2014年) – 『構造と振る舞いを上手く部品化しており、さらにそれらを具体的なインス タンスとしてすべて提示しているため、その妥当性の検証が可能である』 – 『仕様未確定の走行作戦は、走行エリアの寸法とトライクの動作基本長さを 考慮して簡潔で効果的』 ETロボコン2015実施説明会資料/ETロボコン実行委員会 30 『設計課題への対応』 『追跡線隊HiICSレッド』(2014年) – 『各難所の走行戦略は課題と対策が記述されており、深く検討されている様 子が伺える』 – 『仕様未確定エリアについては、ツールで支援されており、短時間で対応で きることが十分伝わってくる』 ETロボコン2015実施説明会資料/ETロボコン実行委員会 31 イノベーター部門 • イノベーター部門の目的である「製品・サービスを企画・開発するスキ ル」を競うために、製品企画の良さと、それを実現するための技術を評 価します • 2015年は、企画のプレゼンテーション力も競技審査の対象に加えます – A4縦サイズ1枚にまとめたプレゼン資料を準備 – 当日の設置時間内に、会場の審査委員に対し企画内容の プレゼンを実施 プレゼンを聞いた人に、 どれだけ“すごい!” と思わせたか? 企画内容とその実現方法が どれだけ説得力を持っているか? 企画内容は妥当か? 企画に十分な訴求力 があるか? 企画を伝える上で十 分な項目が記載され ているか? 説得力ある記述と なっているか? 企画 競技 企画の内容 企画の実現方法 企画書の書き方 ETロボコン2015実施説明会資料/ETロボコン実行委員会 NEW 企画を実現す るためのシス テムアーキテ クチャや技術 要素の妥当性 とその実現可 能性の高さ。 審査 審査 50% 50% 企画を見た人に、 どれだけ“すごい!” と思わせたか? 32 『企画の内容』 審査コメント 『テーマ選定では、業界の動向や将来性 などが十分に検討され、さらにその必然 『追跡線隊HiICSグリーン』(2014年) 性が明確に導出されている』 ETロボコン2015実施説明会資料/ETロボコン実行委員会 33 『企画の実現方法』 『mirai craft』(2014年) ETロボコン2015実施説明会資料/ETロボコン実行委員会 審査コメント 『システム全体のアーキテクチャ などしっかり記載されており、実 現可能性が高いと判断できる。』 34 技術教育 2015年の変更点 • EV3に対応します – 従来のNXTに加え、EV3の以下の開発環境をサポートします • • • • 開発環境:TOPPERS/EV3RT OS:TOPPERSリアルタイム 言語:C, C++ 開発OS:Windows/Mac/Linux – EV3の上記以外の環境は、WEB上でのみ提供します • 実装言語がC++になります – これまでは、実際の開発現場で最も使用頻度の高いC言語を使ってきました が、その一方でモデリングとのギャップが習得を困難にしている事実を鑑み 、今年からC++での実装に切り替えます – なお、従来のNXTのC言語は、参考資料として添付します • その他 – モデリング教育の内容自体に、以下が追加されています • 開発プロセスの記載 • 状態モデルの演習 – MDD環境として、BridgePoint(オープンソース扱いのMDDツール)の環境を 用意します ETロボコン2015実施説明会資料/ETロボコン実行委員会 35 技術教育の位置付け • 実線で囲った部分が、技術教育でサポートする範囲となります – それ以外の内容については、参考情報のみを提供します モデルによるライントレース開発(応用) ・キャリブレーション ・PID制御 ・デバッグ モデルによるライントレース開発(基礎) ・ライントレース ・倒立走行 ・基本的なアーキテクチャ ・走行体のデバイス操作 モデルによる開発 ・モデリング技術 ・開発プロセス モデリング教育 (技術教育1(午後)・技術教育2) デバイス操作(NXT/EV3) ・デバイスのAPI モデリング プラットフォームの知識 ・モデリング言語 ・モデリングツール ・開発環境 ・RTOS 制御工学 要素技術 プログラミング ・プログラミング言語 ・ビルド環境 ETロボコンでは、使用する言語や開発環境に、特に制限は設けていませ んが、すべてについて技術教育でカバーすることはできないため、上記 の内容に限定させて頂いています。 ETロボコン2015実施説明会資料/ETロボコン実行委員会 開発環境・要素技術教育 (技術教育1(午前中)) 36 モデル審査について ETロボコン2015実施説明会資料/ETロボコン実行委員会 37

© Copyright 2026